
大纲
扫描的目的
扫描的实现
编译阶段
运行期内存分配
运行扫描阶段
总结
之前阐述了 golang 垃圾回收通过保证三色不变式来保证回收的正确性,通过写屏障来实现业务赋值器和 gc 回收器正确的并发的逻辑。其中高概率的提到了“扫描队列”和“扫描对象”。队列这个逻辑非常容易理解,那么”扫描对象“ 这个你理解了吗?有直观的感受吗?这篇文章就是要把这个扫描的过程深入剖析下。
- 扫描的东西是啥?形象化描述下
- 怎么去做的扫描?形象化描述下
我们就是要把这两个抽象的概念搞懂,不能停留在语言级别浅层面,要知其然知其所以然。
扫描的目的
扫描到底是为了什么?
之前的文章我们深入剖析了垃圾回收的理论和实现,可以总结这么节点:
- 垃圾回收的根本目的是:“回收那些业务永远都不会再使用的内存块”;
- 扫描的目的则是:“把这些不再使用的内存块找出来”;
我们通过地毯式的扫描,从一些 root 起点开始,不断推进搜索,最终形成了一张有向可达的网,那些不在网里的就是没有被引用到的,也就是可回收的内存。
扫描的实现
扫描对象代码逻辑其实不简单,但主体线索很清晰,可以分为三部分:
- 编译阶段:编译期是非常重要的一环,针对静态类型做好标记准备(旁白:原则上编译期能做的绝对不留到运行期);
- 运行阶段:赋值器分配内存的时候,根据编译阶段的 type 标示,会为分配的对象内存设置好一个对应的指针标示的 bitmap;
- 扫描阶段:根据指针的 bitmap 标示,地毯式扫描;
编译阶段
结构体对齐
要理解编译阶段做的事情,那么首先要理解结构体对齐的基础知识。这个和 C 语言类似,golang 的结构体是有对齐规则的,也就是说,必要的时候可能会填充一些内存空间来满足对齐的要求。总结来说两条规则:
- 长度要对齐
- 地址要对齐
“长度要对齐”怎么理解?
结构体的长度要至少是内部最长的基础字段的整数倍。
举例:
type TestStruct struct { ptr uintptr // 8 f1 uint32 // 4 f2 uint8 // 1}这个结构体内存占用 size 多大?
答案是:16个字节,因为字段 ptr 是 uintptr 类型,占 8 字节,是内部字段最大的,TestStruct 整体长度要和 8 字节对齐。那么就是 16 字节了,而不是有些人想的 13 字节(8+4+1)。
dlv 调试如下:
(dlv) p typ*runtime._type { size: 16, ...字节示意图:
|--8 Byte--|--4 Byte--|--4 Byte--|“地址要对齐”怎么理解?
字段的地址偏移要是自身长度的整数倍。
举例:
type TestStruct struct { ptr uintptr // 8 f1 uint8 // 1 f2 uint32 // 4}newTestStruct0xc00008a0100xc00008a0100xc00008a0180xc00008a01cdlv 调试如下:
(dlv) p &a.ptr(*uintptr)(0xc00008a010)(dlv) p &a.f1(*uint8)(0xc00008a018)(dlv) p &a.f2(*uint32)(0xc00008a01c)0xc00008a0100xc00008a010 == 0xc00008a010 + 00xc00008a018 == 0xc00008a010 + 80xc00008a0190xc00008a01cTestStruct指针位标记
_typeruntime/type.gotype _type struct { size uintptr ptrdata uintptr // size of memory prefix holding all pointers hash uint32 tflag tflag align uint8 fieldalign uint8 kind uint8 alg *typeAlg // gcdata stores the GC type data for the garbage collector. // If the KindGCProg bit is set in kind, gcdata is a GC program. // Otherwise it is a ptrmask bitmap. See mbitmap.go for details. gcdata *byte str nameOff ptrToThis typeOff}比如我们定义了一个 Struct 如下:
type TestStruct struct { ptr uintptr // 8 f1 uint8 // 1 f2 *uint8 // 8 f3 uint32 // 4 f4 *uint64 // 8 f5 uint64 // 8}该结构 dlv 调试如下:
(dlv) p typ*runtime._type { size: 48, ptrdata: 40, hash: 4075663022, tflag: tflagUncommon|tflagExtraStar|tflagNamed (7), align: 8, fieldalign: 8, kind: 25, alg: *runtime.typeAlg {hash: type..hash.main.TestStruct, equal: type..eq.main.TestStruct}, gcdata: *20, str: 28887, ptrToThis: 49504,}_type_typeruntime/typekind.go*byte0001010000101000TestStruct00101000TestStruct.f2TestStruct.f4划重点:这里重点回顾一下 uintptr 类型的问题,这里注意到,第一个字段 ptr(uintptr 类型)在指针的 bitmap 上是没有标记成指针类型的,这里一定要注意了,uintptr 是数值类型,非指针类型,用这个存储指针是无法保护对象的(扫描的时候 uintptr 指向的对象不会被扫描),这里就是实锤了。
小结:
_type思考题:是否可以不用 bitmap,其实有个最简单最笨拙的扫描方式,我们可以不搞这个指针的 bitmap,我上来就直接扫描,每 8 字节的读取内存,然后去看这个内存块存储的值是否指向了一个对象?如果是我就保护起来。
这个实现理论上可以满足,但是有两个不能接受的缺陷:
- 精度太低,你编译期间不做准备,那运行期间就要来偿还这部分损耗,你无法判断是不是指针,所以只要指向了一个有效内存地址,就得无脑保护,这样就保护了很多不需要保护的内存块;
- 扫描太低效,必须全地址扫描,因为你没有 bitmap,无法识别是否有指针。也无法做优化,比如我们程序里面可能 一半以上的类型内是不包含指针的,这种根本就不需要扫描;
运行期内存分配
runtime.newobject- 分配内存
- 内存采样
- gc 标记准备
heapBitsSetTypeheapBitsSetTypeheapBitsSetTypefunc heapBitsSetType(x, size, dataSize uintptr, typ *_type) { // ... // 最重要的两个步骤: // 通过分配地址反查获取到 heap 的 heapBits 结构(回忆下 golang 的内存地址管理) h := heapBitsForAddr(x) // 获取到类型的指针 bitmap; ptrmask := typ.gcdata // start of 1-bit pointer mask (or GC program, handled below) var ( // ... ) // 把 h.bitp 这个堆上的 bitmap 取出来; hbitp = h.bitp // 该类型的指针 bitmap p = ptrmask // ... if p != nil { // 把 bitmap 第一个字节保存起来 b = uintptr(*p) // p 指向下一个字节 p = add1(p) // nb = 8 } // 我们的是简单的 Struct 结构(48==48) if typ.size == dataSize { // nw == 5 == 40/8,说明扫描到第 5 个字段为止即可。 // ptrdata 指明有指针的范围在[0, 40]以内,再往外确定就没有指针字段了; nw = typ.ptrdata / sys.PtrSize } else { nw = ((dataSize/typ.size-1)*typ.size + typ.ptrdata) / sys.PtrSize } switch { default: throw("heapBitsSetType: unexpected shift") case h.shift == 0: // b 是类型的 ptr bitmap => 00010100 // bitPointerAll => 00001111 // hb => 0000 0100 hb = b & bitPointerAll // bitScan => 0001 0000 // 0001 0000 | 0100 0000 | 1000 0000 // hb => 1101 0100 hb |= bitScan | bitScan<2*heapBitsShift) | bitScan<3*heapBitsShift) // 赋值 hbitp => 1101 0100 *hbitp = uint8(hb) // 指针往后一个字节(递进一个字节) hbitp = add1(hbitp) // b => 0000 0001 b >>= 4 // nb => 4 nb -= 4 case sys.PtrSize == 8 && h.shift == 2: // ... } // ... // 处理完了前 4 bit,接下来处理后 4 bit nb -= 4 for { // b => 0000 0001 // hb => 0000 0001 hb = b & bitPointerAll // hb => 1111 0001 hb |= bitScanAll if w += 4; w >= nw { // 处理完了,有指针的字段都包含在已经处理的 ptrmask 范围内了 break } // ... }Phase3: // Phase 3: Write last byte or partial byte and zero the rest of the bitmap entries. // 8 > 5 if w > nw { // mask => 1 mask := uintptr(1)<4-(w-nw)) - // hb => 0001 0001 hb &= mask | mask<<4 // apply mask to both pointer bits and scan bits } // nw => 6 nw = size / sys.PtrSize // ... if w == nw+2 { // 赋值 hbitp => 0001 0001 *hbitp = *hbitp&^(bitPointer|bitScan|(bitPointer|bitScan)<uint8(hb) }Phase4: // Phase 4: Copy unrolled bitmap to per-arena bitmaps, if necessary. // ...}所以,上面函数调用完,h.bitp 就给设置上了:
低字节 -> 高字节 [ 1101 0100 ], [ 0001 0001 ] |--前4*8字节--|--后4*8字节--|
这个就是 mallocgc 内存的时候做的事情。
总结就一句话:根据编译期间针对每个 struct 生成的 type 结构,来设置 gc 需要扫描的位图,也就是指针 bitmap。(旁白:每分配一块内存出去,我都会有一个 bitmap 对应到这个内存块,指明哪些地方有指针)。
运行扫描阶段
markrootscanstackgoroutinegcDrainscanobjectscanstackscanobjectscanstack这个函数是起点函数( 起始最原始的还是 markroot,但是我们这里梳理主线 ),该扫描栈上所有可达对象,因为栈是一个根,因为你做事情总要有个开始的地方,那么“栈”就是 golang 的起点。
func scanstack(gp *g, gcw *gcWork) { // ... // 扫描栈上所有的可达的对象 state.buildIndex() for { p := state.getPtr() if p == 0 { break } // 获取一个到栈上对象 obj := state.findObject(p) if obj == nil { continue } // 获取到这个对象的类型 t := obj.typ // ... // 获取到这个类型内存块的 ptr 的 bitmap(编译期间编译器设置好) gcdata := t.gcdata var s *mspan if t.kind&kindGCProg != 0 { s = materializeGCProg(t.ptrdata, gcdata) gcdata = (*byte)(unsafe.Pointer(s.startAddr)) } // 扫描这个对象 // 起点:对象起始地址 => state.stack.lo + obj.off // 终点:t.ptrdata (还记得这个吧,这个指明了指针所在内的边界) // 指针 bitmap:t.gcdata scanblock(state.stack.lo+uintptr(obj.off), t.ptrdata, gcdata, gcw, &state) if s != nil { dematerializeGCProg(s) } } // ...}小结::
- 找到这个 goroutine 栈上的内存对象(一个个找,一个个处理);
- 找到对象之后,获取到这个对象的 type 结构,然后取出 type.ptrdata, type.gcdata ,从而我们就知道扫描的内存范围,和内存块上指针的所在位置;
- 调用 scanblock 扫描这个内存块;
scanblock
scanblock/*b0: 扫描开始的位置n0: 扫描结束的长度ptrmask: 指针的 bitmap*/func scanblock(b0, n0 uintptr, ptrmask *uint8, gcw *gcWork, stk *stackScanState) { b := b0 n := n0 // 扫描到长度 n 为止; for i := uintptr(0); i < n; { // 每个 bit 标识一个 8 字节,8个 bit (1个字节)标识 64 个字节; // 这里计算到合适的 bits bits := uint32(*addb(ptrmask, i/(sys.PtrSize*8))) // 如果整个 bits == 0,那么说明这 8 个 8 字节都没有指针引用,可以直接跳到下一轮 if bits == 0 { i += sys.PtrSize * 8 continue } // bits 非0,说明内部有指针引用,就必须一个个扫描查看; for j := 0; j < 8 && i < n; j++ { // 指针类型?只有标识了指针类型的,才有可能走到下面的逻辑去; if bits&1 != 0 { p := *(*uintptr)(unsafe.Pointer(b + i)) if p != 0 { if obj, span, objIndex := findObject(p, b, i); obj != 0 { // 如果这 8 字节指向的是可达的内存对象,那么就投入扫描队列(置灰)保护起来; greyobject(obj, b, i, span, gcw, objIndex) } else if stk != nil && p >= stk.stack.lo && p < stk.stack.hi { stk.putPtr(p) } } } bits >>= 1 i += sys.PtrSize } }}0xc00007cf20scanblock ( 0xc00007cf20, 40, 20, xxx)type TestStruct struct { ptr uintptr // 8 f1 uint8 // 1 f2 *uint8 // 8 f3 uint32 // 4 f4 *uint64 // 8 f5 uint64 // 8 }示意图如下:
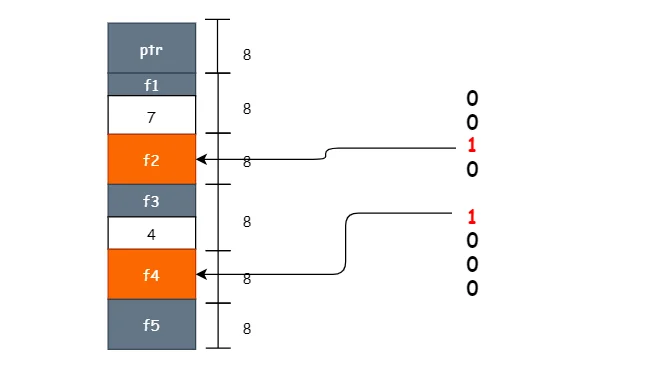
type.ptrdata == 40小结:
scanblockscanobject
gcDrain 这个函数就是从队列里不断获取,处理这些对象,最重要的一个就是调用 scanobject 继续扫描对象。
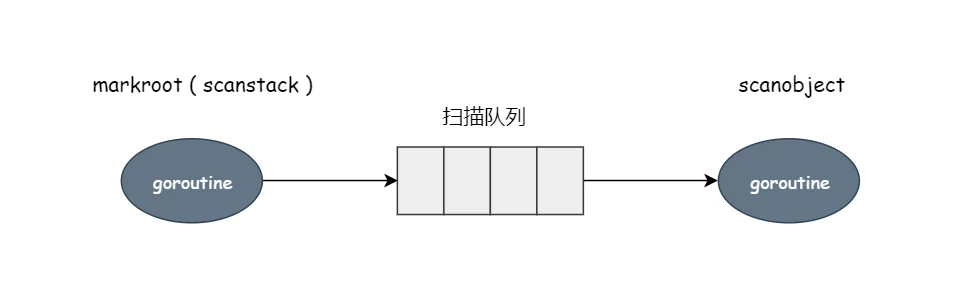
markroot 从根(栈)扫描,把扫描到的对象投入扫描队列。gcDrain 等函数从里面不断获取,不断处理,并且扫描这些对象,进一步挖掘引用关系,当扫描结束之后,那些没有扫描到的就是垃圾了。
还是 TestStruct 举例:
type TestStruct struct { ptr uintptr // 8 f1 uint8 // 1 f2 *uint8 // 8 f3 uint32 // 4 f4 *uint64 // 8 f5 uint64 // 8}TestStructtype.gcdata0001 0100TestStruct(dlv) p typ*runtime._type { size: 48, ptrdata: 40, ... gcdata: *20, ... }scanobject/*b : 是对象的内存地址gcw : 是扫描队列的封装*/func scanobject(b uintptr, gcw *gcWork) { // 通过对象地址 b 获取到这块内存地址对应的 hbits hbits := heapBitsForAddr(b) // 通过对象地址 b 获取到这块内存地址所在的 span s := spanOfUnchecked(b) // span 的元素大小 n := s.elemsize if n == 0 { throw("scanobject n == 0") } // ... var i uintptr // 每 8 个字节处理递进处理(因为堆上对象分配都是 span,每个 span 的内存块都是定长的,所以扫描边界就是 span.elemsize ) for i = 0; i < n; i += sys.PtrSize { if i != 0 { hbits = hbits.next() } // 获取到内存块的 bitmap bits := hbits.bits() // 确认该整个内存块没有指针,直接跳出,节约时间; if i != 1*sys.PtrSize && bits&bitScan == 0 { break // no more pointers in this object } // 确认 bits 对应的小块内存没有指针,所以可以直接到下一轮 // 如果是指针,那么就往下看看这 8 字节啥情况 if bits&bitPointer == 0 { continue // not a pointer } // 把这 8 字节里面存的值取出来; obj := *(*uintptr)(unsafe.Pointer(b + i)) // 如果 obj 有值,并且合法(不在一个 span 的内存块里) if obj != 0 && obj-b >= n { // 如果 obj 指向一个有效的对象,那么把这个对象置灰色,投入扫描队列,等待处理 if obj, span, objIndex := findObject(obj, b, i); obj != 0 { greyobject(obj, b, i, span, gcw, objIndex) } } } // ...}小结:
- scanobject 的目的其实很简单:就是进一步发现引用关系,尽可能的把可达对象全覆盖;
- 这个地方就没有直接使用到 type ,而是使用到 mallocgc 时候的准备成果( heapBitsSetType 设置),每个内存块都对应了一个指针的 bitmap;
总结
- 要达到“正确并且高效的扫描”需要 编译期间,运行分配期间,扫描期间 三者配合处理;
- 内存对齐是非常重要的一个前提条件;
- 编译期间生成 type 类型,对用户定义的类型全方位分析,标记出所有的指针类型字段;
- 运行期间,赋值器分配内存的时候,根据 type 结构,设置和对象内存一一对应的 bitmap,标明指针所在位置,以便后续 gc 扫描;
- 回收器扫描期间,从根部开始扫描,遇到对象,则置灰,投入队列,并且不断的扫描这些对象指向的对象,直到结束。扫描的依据,就根据编译期间生成的 bitmap,分配期间设置的 bitmap 来识别哪些地方有指针,然后进一步处理;
- 扫描只需要给个开始地址,然后每 8 字节推进就可以扫描了,为了加快效率我们才有了指针的 bitmap (所以这个是个优化项);
- 再次强调下,定义的非指针类型不受保护,比如 uintptr 里面就算存储的是一个地址的值,也是不会被扫描到的;
推荐阅读
Go GC 怎么标记内存?颜色是什么含义?图解三色标记法

站长 polarisxu
自己的原创文章
不限于 Go 技术
职场和创业经验
Go语言中文网
每天为你
分享 Go 知识
Go爱好者值得关注
