
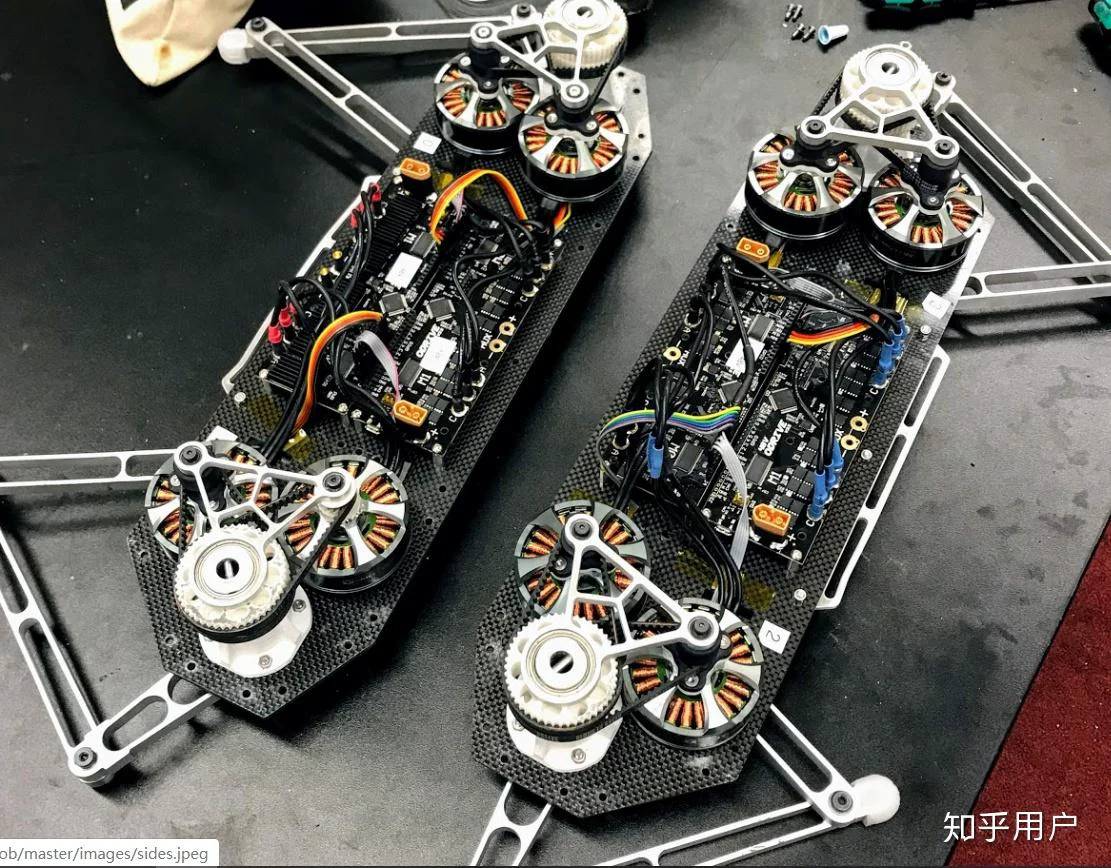
来自斯坦福大学的开源仿生机械狗,可以行走、跳高、空翻,而且很小巧



 B站视频https://www.zhihu.com/video/1234750585368076288
B站视频https://www.zhihu.com/video/1234750585368076288视频链接:
作者几乎开源了所有的内容,包括CAD、代码、PCB、论文等等,用作者的话说:任何任都可以制作四足机器人。国内有很多仿制的项目,整体做下来的价格在一万左右。
除此之外,推荐一个开源伺服驱动器:ODrive,而且这个Doggo就是用的ODrive。
官网:
固件:
硬件:
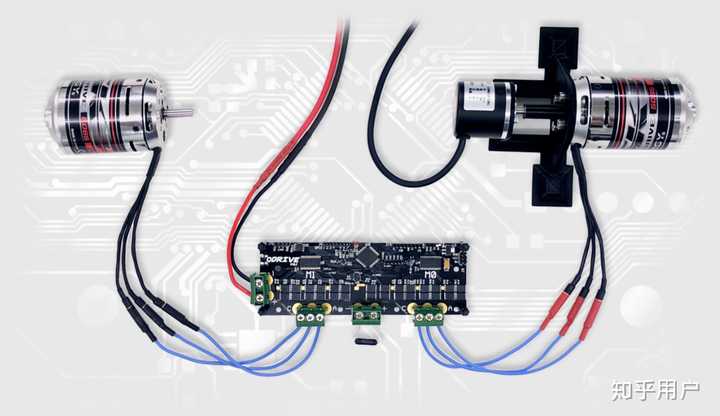
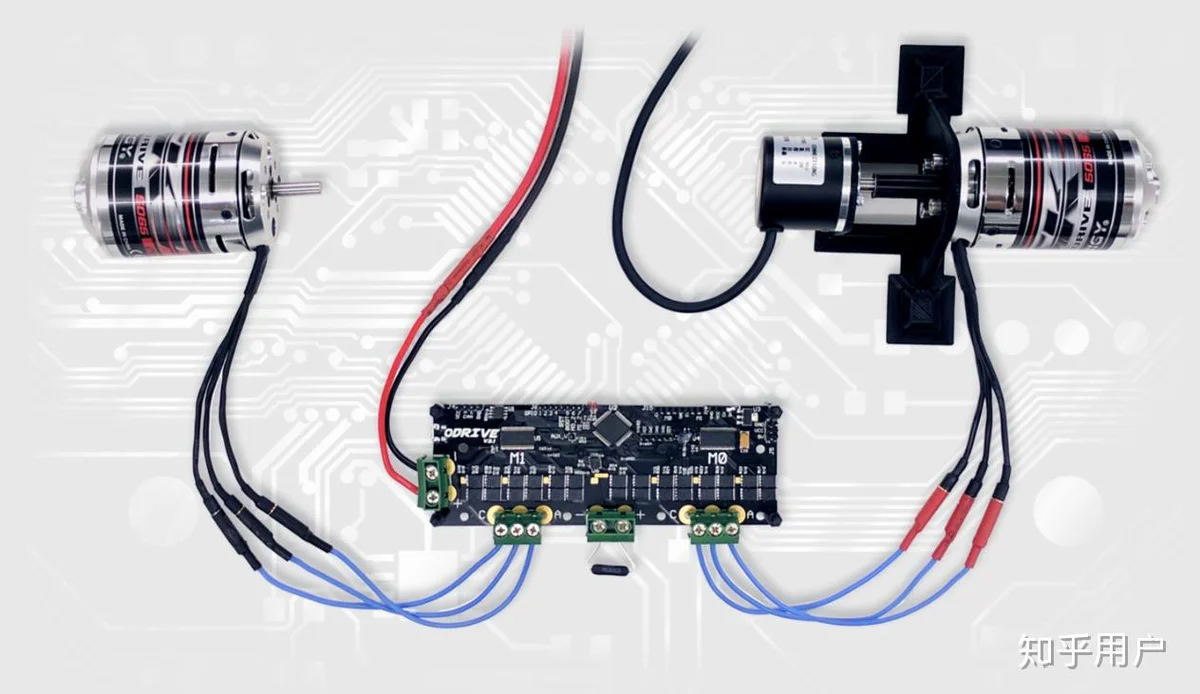
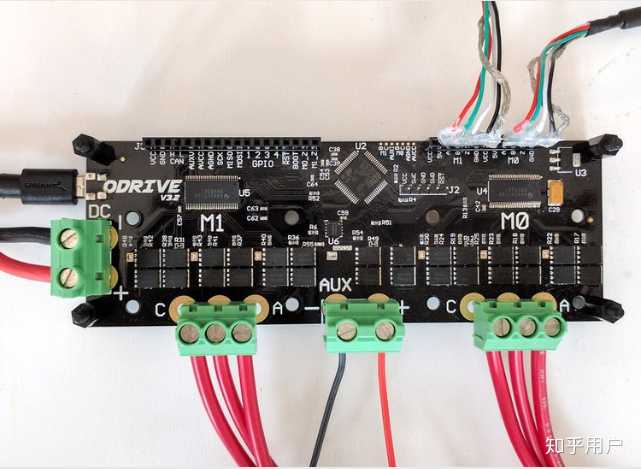
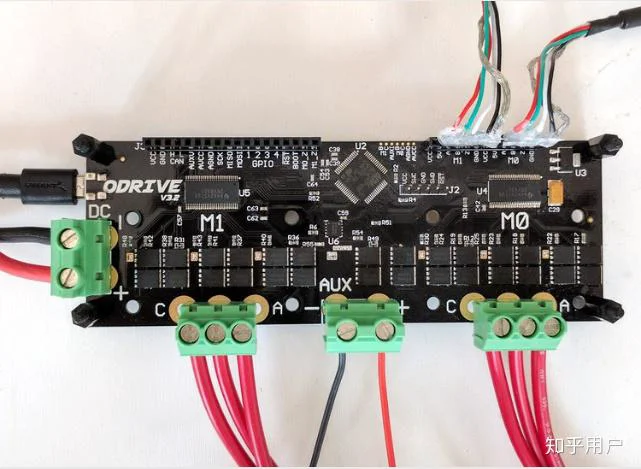
ODrive可以同时驱动两个伺服电机,支持霍尔编码器和普通的五线制(非差分)编码器。作者还编写了一套基于Python的配置、调试工具,用于设置驱动器参数,查看驱动器反馈等。同时硬件部分也开源了,可以自己发PCB,也可以淘宝买,600左右,就可以买到可以同时驱动两个伺服电机且单路电流60A以上的高性能伺服电机。要知道Elmo的驱动器,ODrive这种性能的,要一万块钱。所以ODrive是制作机器人的不二之选。