
本来 map 的遍历过程比较简单:遍历所有的 bucket 以及它后面挂的 overflow bucket,然后挨个遍历 bucket 中的所有 cell。每个 bucket 中包含 8 个 cell,从有 key 的 cell 中取出 key 和 value,这个过程就完成了。
但是,现实并没有这么简单。还记得前面讲过的扩容过程吗?扩容过程不是一个原子的操作,它每次最多只搬运 2 个 bucket,所以如果触发了扩容操作,那么在很长时间里,map 的状态都是处于一个中间态:有些 bucket 已经搬迁到新家,而有些 bucket 还待在老地方。
因此,遍历如果发生在扩容的过程中,就会涉及到遍历新老 bucket 的过程,这是难点所在。
我先写一个简单的代码样例,假装不知道遍历过程具体调用的是什么函数:
package main
import "fmt"
func main() {
ageMp := make(map[string]int)
ageMp["qcrao"] = 18
for name, age := range ageMp {
fmt.Println(name, age)
}
}
执行命令:
go tool compile -S main.go
得到汇编命令。这里就不逐行讲解了,可以去看之前的几篇文章,说得很详细。
关键的几行汇编代码如下:
// ......
0x0124 00292 (test16.go:9) CALL runtime.mapiterinit(SB)
// ......
0x01fb 00507 (test16.go:9) CALL runtime.mapiternext(SB)
0x0200 00512 (test16.go:9) MOVQ ""..autotmp_4+160(SP), AX
0x0208 00520 (test16.go:9) TESTQ AX, AX
0x020b 00523 (test16.go:9) JNE 302
// ......
mapiterinitmapiternext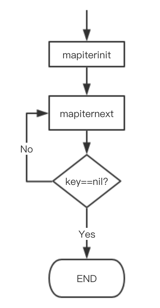
迭代器的结构体定义:
type hiter struct {
// key 指针
key unsafe.Pointer
// value 指针
value unsafe.Pointer
// map 类型,包含如 key size 大小等
t *maptype
// map header
h *hmap
// 初始化时指向的 bucket
buckets unsafe.Pointer
// 当前遍历到的 bmap
bptr *bmap
overflow [2]*[]*bmap
// 起始遍历的 bucket 编号
startBucket uintptr
// 遍历开始时 cell 的编号(每个 bucket 中有 8 个 cell)
offset uint8
// 是否从头遍历了
wrapped bool
// B 的大小
B uint8
// 指示当前 cell 序号
i uint8
// 指向当前的 bucket
bucket uintptr
// 因为扩容,需要检查的 bucket
checkBucket uintptr
}
mapiterinit前面已经提到过,即使是对一个写死的 map 进行遍历,每次出来的结果也是无序的。下面我们就可以近距离地观察他们的实现了。
// 生成随机数 r
r := uintptr(fastrand())
if h.B > 31-bucketCntBits {
r += uintptr(fastrand()) << 31
}
// 从哪个 bucket 开始遍历
it.startBucket = r & (uintptr(1)<<h.B - 1)
// 从 bucket 的哪个 cell 开始遍历
it.offset = uint8(r >> h.B & (bucketCnt - 1))
uintptr(1)<mapiternext源码部分比较好看懂,尤其是理解了前面注释的几段代码后,再看这部分代码就没什么压力了。所以,接下来,我将通过图形化的方式讲解整个遍历过程,希望能够清晰易懂。
1 号1 号3 号0 号*oldbuckets*buckets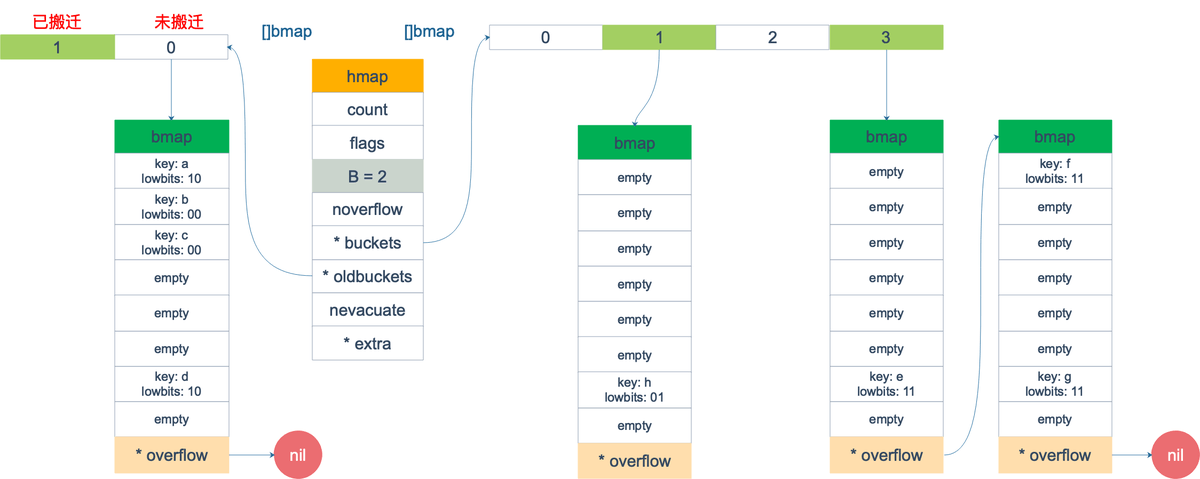
这时,我们对此 map 进行遍历。假设经过初始化后,startBucket = 3,offset = 2。于是,遍历的起点将是 3 号 bucket 的 2 号 cell,下面这张图就是开始遍历时的状态:
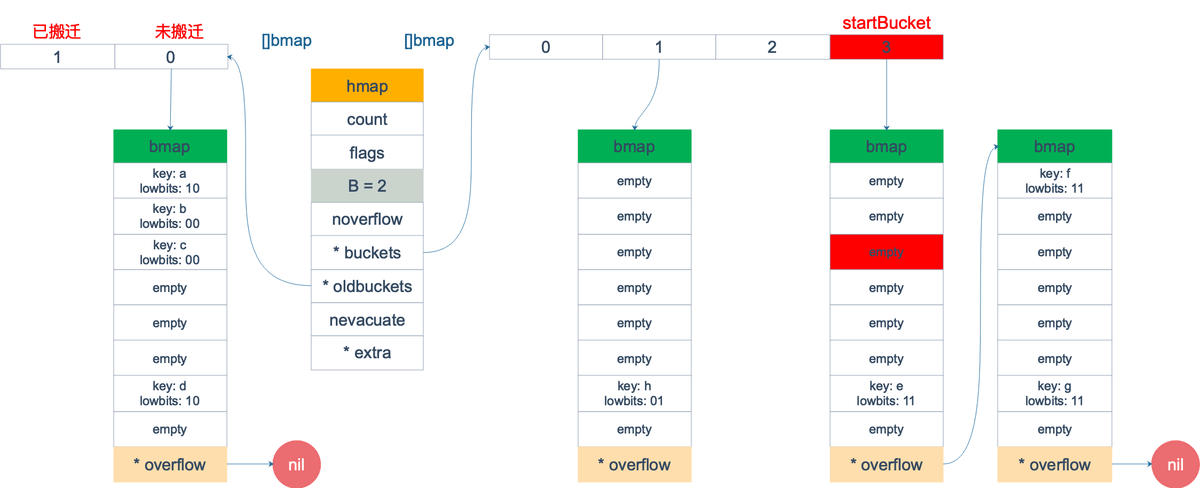
标红的表示起始位置,bucket 遍历顺序为:3 -> 0 -> 1 -> 2。
因为 3 号 bucket 对应老的 1 号 bucket,因此先检查老 1 号 bucket 是否已经被搬迁过。判断方法就是:
func evacuated(b *bmap) bool {
h := b.tophash[0]
return h > empty && h < minTopHash
}
如果 b.tophash[0] 的值在标志值范围内,即在 (0,4) 区间里,说明已经被搬迁过了。
empty = 0
evacuatedEmpty = 1
evacuatedX = 2
evacuatedY = 3
minTopHash = 4
在本例中,老 1 号 bucket 已经被搬迁过了。所以它的 tophash[0] 值在 (0,4) 范围内,因此只用遍历新的 3 号 bucket。
依次遍历 3 号 bucket 的 cell,这时候会找到第一个非空的 key:元素 e。到这里,mapiternext 函数返回,这时我们的遍历结果仅有一个元素:
由于返回的 key 不为空,所以会继续调用 mapiternext 函数。
继续从上次遍历到的地方往后遍历,从新 3 号 overflow bucket 中找到了元素 f 和 元素 g。
遍历结果集也因此壮大:

新 3 号 bucket 遍历完之后,回到了新 0 号 bucket。0 号 bucket 对应老的 0 号 bucket,经检查,老 0 号 bucket 并未搬迁,因此对新 0 号 bucket 的遍历就改为遍历老 0 号 bucket。那是不是把老 0 号 bucket 中的所有 key 都取出来呢?
*bucketlowbits == 00
和之前的流程一样,继续遍历新 1 号 bucket,发现老 1 号 bucket 已经搬迁,只用遍历新 1 号 bucket 中现有的元素就可以了。结果集变成:

lowbit == 10这样,遍历结果集变成:

最后,继续遍历到新 3 号 bucket 时,发现所有的 bucket 都已经遍历完毕,整个迭代过程执行完毕。
math.NaN()map 遍历的核心在于理解 2 倍扩容时,老 bucket 会分裂到 2 个新 bucket 中去。而遍历操作,会按照新 bucket 的序号顺序进行,碰到老 bucket 未搬迁的情况时,要在老 bucket 中找到将来要搬迁到新 bucket 来的 key。