
结构体
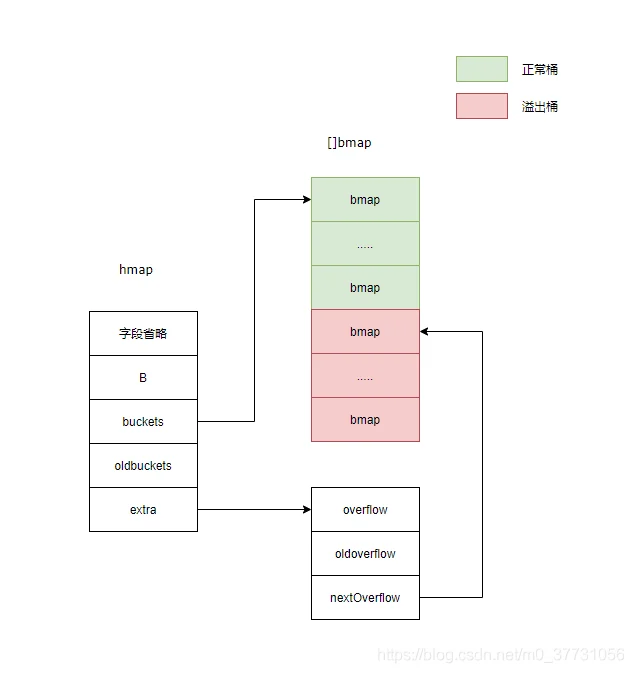
哈希表结构体:
// A header for a Go map.
type hmap struct {
count int //表示当前哈希表中元素的数量
flags uint8 //标记
B uint8 // 桶的数量2^B
noverflow uint16 // 溢出桶数量统计
hash0 uint32 // 哈希因子,用于计算出hash值
buckets unsafe.Pointer //2^B的桶
oldbuckets unsafe.Pointer //扩容时用于保存之前的buckets
nevacuate uintptr//扩容之后数据迁移的计数器,记录下次迁移的位置
extra *mapextra // 额外的map字段,存储溢出桶信息
}
- count表示当前哈希表中元素的数量
- flags 表示哈希表的标记 1表示buckets正在被使用 2表示oldbuckets正在被使用 4表示哈希正在被写入 8表示哈希是等量扩容
- B表示2的B次方系数表示,如B是5,那么桶的数量就有2^5个
哈希表结构体溢出桶信息:
// mapextra holds fields that are not present on all maps.
type mapextra struct {
overflow *[]*bmap //所有的溢出桶数据
oldoverflow *[]*bmap //所有旧溢出桶数据
// nextOverflow holds a pointer to a free overflow bucket.
nextOverflow *bmap //指向下一个溢出桶
}
桶结构体:
// A bucket for a Go map.
type bmap struct {
//tophash用于快速从桶中找到对应键值对的位置
tophash [bucketCnt]uint8
}
makemap初始化
哈希表的初始化如图所示:
当我们调用make关键字对map进行初始化的时候,Go语言编译器会将它转化成makemap。
make(map[k]v,hint)//hint表示元素的个数
func makemap(t *maptype, hint int, h *hmap) *hmap {
//计算内存空间和判断是否内存溢出
mem, overflow := math.MulUintptr(uintptr(hint), t.bucket.size)
if overflow || mem > maxAlloc {
hint = 0
}
// initialize Hmap
if h == nil {
h = new(hmap)
}
h.hash0 = fastrand()
//计算出指数B,那么桶的数量表示2^B
B := uint8(0)
for overLoadFactor(hint, B) {
B++
}
h.B = B
if h.B != 0 {
var nextOverflow *bmap
//根据B去创建对应的桶和溢出桶
h.buckets, nextOverflow = makeBucketArray(t, h.B, nil)
if nextOverflow != nil {
h.extra = new(mapextra)
h.extra.nextOverflow = nextOverflow
}
}
return h
}
主要的步骤为:
- 计算出需要的内存空间并且判断内存是否溢出
- hmap没有的情况进行初始化,并设置hash0表示hash因子
- 计算出指数B,桶的数量表示为2^B,通过makeBucketArray去创建对应的桶和溢出桶
我们来看看makeBucketArray是如何创建桶和溢出桶
func makeBucketArray(t *maptype, b uint8, dirtyalloc unsafe.Pointer) (buckets unsafe.Pointer, nextOverflow *bmap) {
base := bucketShift(b)
nbuckets := base
//当指数B大于等于4,增加额外的溢出桶
if b >= 4 {
//溢出桶个数为2^(B-4)
nbuckets += bucketShift(b - 4)
sz := t.bucket.size * nbuckets
up := roundupsize(sz)
if up != sz {
nbuckets = up / t.bucket.size
}
}
if dirtyalloc == nil {
//生成对应数量的桶
buckets = newarray(t.bucket, int(nbuckets))
} else {
buckets = dirtyalloc
size := t.bucket.size * nbuckets
if t.bucket.ptrdata != 0 {
memclrHasPointers(buckets, size)
} else {
memclrNoHeapPointers(buckets, size)
}
}
if base != nbuckets {
//得到对应的溢出桶
nextOverflow = (*bmap)(add(buckets, base*uintptr(t.bucketsize)))
last := (*bmap)(add(buckets, (nbuckets-1)*uintptr(t.bucketsize)))
last.setoverflow(t, (*bmap)(buckets))
}
return buckets, nextOverflow
}
- 当桶的数量小于2^4时,可能数据较少,使用溢出桶的可能较低,所以不会创建溢出桶
- 当桶的数量大于2^4时, 可能数据较多,使用溢出桶可能性较大,所以会创建额外的
2^B-4的桶。
写入
写入过程示意图:
func mapassign(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
.....
//计算出hash值
hash :=t.hasher(key,uintptr(h.hash0))
//更新状态为正在写入
h.flags ^= hashWriting
again:
//通过hash获取对应的桶
bucket := hash & bucketMask(h.B)
b :=(*bmap)(unsafe.Pointer(uintptr(h.buckets)+bucket*uintptr(t.bucketsize)))
//计算出tophash
top :=tophash(hash)
var inserti *uint8//记录插入的tophash
var insertk unsafe.Pointer//记录插入的key值地址
var elem unsafe.Pointer//记录插入的value值地址
bucketloop:
for{
for i :=uintptr(0);i < bucketCnt;i++{
//判断tophash是否相等
if b.tophash[i] != top {
//如果tophash不相等并且等于空,则可以插入该位置
if isEmpty(b.tophash[i]) && inserti == nil {
inserti = &b.tophash[i]
//获取对应插入key和value的指针地址
insertk = add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
elem = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.elemsize))
}
if b.tophash[i] == emptyRest {
break bucketloop
}
continue
}
//走到这里,说明已经存在,获得指定的key和value在桶得位置地址
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
//如果是指针,则要转化为指针
if t.indirectkey() {
k = *((*unsafe.Pointer)(k))
}
//判断key值是否相等
if !t.key.equal(key, k) {
continue
}
// already have a mapping for key. Update it.
//如果key值需要修改,那么修改key值
if t.needkeyupdate() {
typedmemmove(t.key, k, key)
}
//获取value元素地址
elem = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.elemsize))
goto done
//未找到可插入的位置,找一下有没溢出桶,如果有继续执行写入操作
ovf := b.overflow(t)
if ovf == nil{
break
}
b = ovf
}
}
if inserti == nil {
//如果在正常桶和溢出桶中都未找到插入的位置,那么得到一个新的溢出桶执行插入
newb := h.newoverflow(t, b)
inserti = &newb.tophash[0]
insertk = add(unsafe.Pointer(newb), dataOffset)
elem = add(insertk, bucketCnt*uintptr(t.keysize))
}
.....
//将key值信息插入桶中指定位置
typedmemmove(t.key, insertk, key)
*inserti = top//更新tophash值
h.count++
done:
h.flags &^= hashWriting
if t.indirectelem() {
elem = *((*unsafe.Pointer)(elem))
}
return elem //返回value的指针地址
}
- 计算key的hash值,通过hash的高八位和低B为分别确定tophash和桶的序号
tophash是什么?
tophash是用来快速定位key和value的位置的,在查找或删除过程如果高8位hash都不相等,那么就没必要再去比较key值是否相等了,效率相对会高一些。
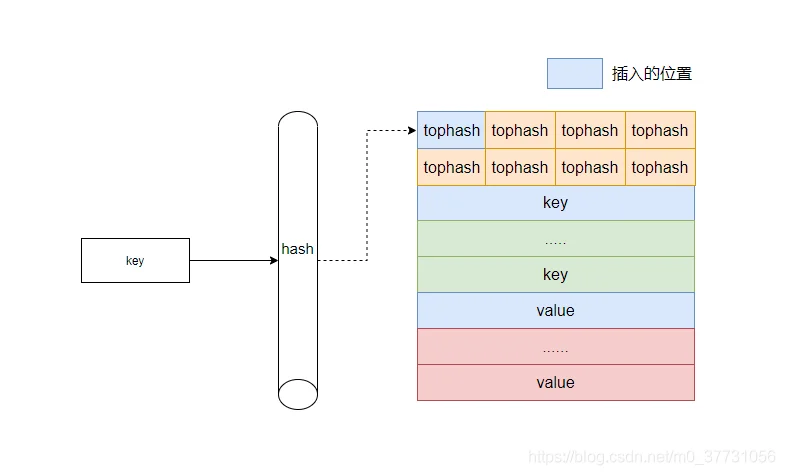
如何定位到哪个桶执行插入?
例如哈希表对应2^4个桶,即B是4,某个key的hash二进制值是如下值,那么如图可知该key对应的tophash值为10001100,即140,桶的值为0111,即是桶的序号为7。
hash := 100011001101111001110010010110000001111010110000100101011010111

确定tophash和桶的序号之后就可以进行插入操作。
- 每个桶可以存储8个tophash、8个key、8个value,遍历桶中的tophash,如果tophash不相等且是空的,说明该位置可以插入,分别获取对应位置key和value的地址并更新tophash。
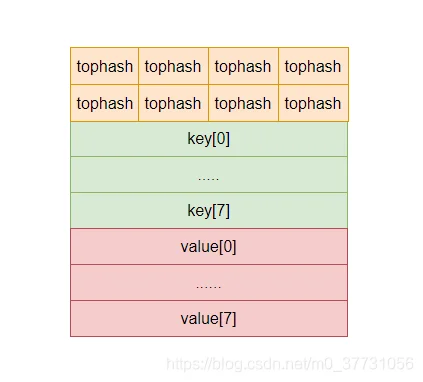
桶的结构到底是怎样的?
桶的结构体并不是上面提到的tophash [8]uint8,因为go是不支持泛型的,所以在编译过程中才会根据具体的类型确定,实际上桶的结构可以表示为:
type bmap struct {
topbits [8]uint8
keys [8]keytype
values [8]valuetype
pad uintptr
overflow uintptr
}
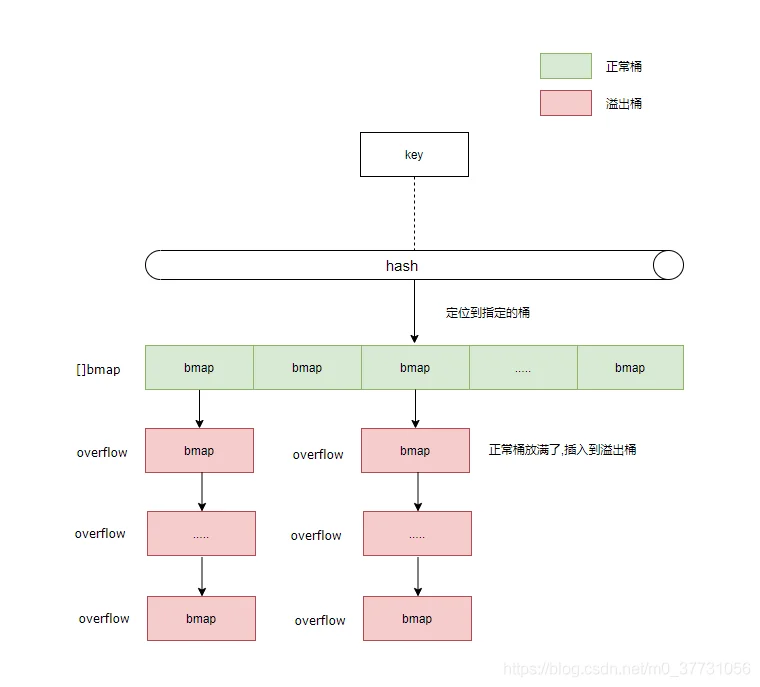
插入到具体某个桶的示意图:
- 如果遍历桶中的tophash是相等的,说明执行过插入操作,同样的获取对应位置的key和value的地址。
- 如果当前桶找不到插入的位置,说明可能满了,尝试去溢出桶中执行插入操作。
- 如果未找到溢出桶或溢出桶也满了,那么调用newoverflow获取一个溢出桶执行插入操作,然后同样是获取溢出桶插入位置的key和value地址并更新tophash。
一开始的时候正常桶和溢出桶是一块连续的内存空间,后来因为某个桶满了需要用到溢出桶执行插入操作,那么这时候这个溢出桶就会被链接到这个桶的最后方,形成链表,这个方法主要通过newoverflow来完成的。
func (h *hmap) newoverflow(t *maptype, b *bmap) *bmap {
var ovf *bmap
if h.extra != nil && h.extra.nextOverflow != nil{
//从预分配好的溢出桶中获取一个桶
ovf = h.extra.nextOverflow
//如果下一个溢出桶不为空,还记得makeBucketArray方法里,最后一个溢出桶尾部链接的是buckets首地址,当不为nil的时候才是表示用完了
if ovf.overflow(t) == nil{
h.extra.nextOverflow =(*bmap)(add(unsafe.Pointer(ovf), uintptr(t.bucketsize)))
}else{
//如果溢出桶用完了,标记extra.nextOverflow为nil
ovf.setoverflow(t,nil)
h.extra.nextOverflow = nil
}
}else{
//溢出桶被用完了,从内存中分配一个溢出桶
ovf =(*bmap)(newobject(t.bucket))
}
h.incrnoverflow()//溢出统计,扩容时也会参考这个
//如果不是指针
if t.bucket.ptrdata == 0{
h.createOverflow()
*h.extra.overflow = append(*h.extra.overflow, ovf)//将溢出桶加入到h.extra.overflow
}
b.setoverflow(t,ovf) //将要用的溢出桶链接在当前桶的最尾部
return ovf
}
这里还有一个需要注意的点,插入过程最后elem(value)返回的仅仅是指针地址,真正的数据写入其实是在编译的时候完成的。
0x00e0 00224 (main.go:5) CALL runtime.mapassign(SB) //写入操作
0x00e5 00229 (main.go:5) MOVQ 24(SP), DI //DI = &value
0x0104 00260 (main.go:5) LEAQ go.string."hello world"(SB), AX //AX =&"hello world"
0x010b 00267 (main.go:5) MOVQ AX, (DI) //*DI = AX
扩容
其实哈希表还没有我们想象的这么简单,因为在写入过程中还涉及到扩容的操作,扩容之后还涉及到数据迁移的过程,还需要把旧桶的数据迁移到新的桶之中,先来看看扩容的过程。
func mapassign(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
.....
//判断是否扩容的条件
if !h.growing() && (overLoadFactor(h.count+1, h.B) || tooManyOverflowBuckets(h.noverflow, h.B)) {
hashGrow(t, h)
goto again // Growing the table invalidates everything, so try again
}
.....
}
判断是否扩容的条件:
- 哈希表不是正在扩容的状态
- 元素的数量 > 2^B次方(桶的数量) * 6.5,6.5表示为装载因子,很容易理解装载因子最大为8(一个桶能装载的元素数量)
- 溢出桶过多,当前已经使用的溢出桶数量 >=2^B次方(桶的数量) ,B最大为15
上述条件满足就会触发扩容机制,扩容分为两种,一种是等量扩容和2倍扩容:
func hashGrow(t *maptype,h *hmap){
//没有超出装载因子是等量扩容
bigger := uint8(1)
if !overLoadFactor(h.count+1,h.B){
bigger = 0
h.flags |= sameSizeGrow
}
//将当前桶设置为旧桶,调用makeBucketArray分配新的top和溢出桶
oldbuckets := h.buckets
newbuckets, nextOverflow := makeBucketArray(t, h.B+bigger, nil)
//更新哈希的标志
flags := h.flags &^ (iterator | oldIterator)
if h.flags&iterator != 0{
flags |= oldIterator
}
//更新哈希表的信息
h.B += bigger
h.flags = flags
h.oldbuckets = oldbuckets
h.buckets = newbuckets
h.nevacuate = 0
h.noverflow = 0
//同理将已经使用的溢出桶设置为旧的溢出桶
if h.extra != nil && h.extra.overflow != nil{
h.extra.oldoverflow = h.extra.overflow
h.extra.overflow = nil
}
//更新溢出桶相关信息
if nextOverflow != nil{
if h.extra == nil{
h.extra = new(mapextra)
}
h.extra.nextOverflow = nextOverflow
}
}
- 调用overLoadFactor函数判断装载因子是否超出,如果超出则进行2倍扩容,如果不是则进行等量扩容。
- 如果是等量扩容,只需要分配原来2^B数量的桶即可,如果是2倍扩容,只需B+1,即是2B+1数量的桶。
- 同样的调用makeBucketArray函数来分配对应数量的桶,这时候h.buckets会变为h.oldbuckets,新创建的桶newbuckets会被设置为h.buckets。
- 和桶的设置一样,当前正在使用的h.extra.overflow溢出桶会变为h.extra.oldoverflow,h.extra.overflow会被设置成nil,同时h.extra.nextOverflow也会更新指向到新创建的未使用的溢出桶。
迁移
在上面扩容hashGrow方法中仅仅是完成扩容的操作,并没有进行数据的迁移,实际上在扩容完成后,在下次写入操作或删除操作之前,就会进行数据的迁移。
func mapassign(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
.....
//如果正在扩容,进行数据迁移
if h.growing(){
growWork(t, h, bucket)
}
.....
}
迁移的话会以桶为单位,先对当前要操作的桶进行数据的迁移,同时为了加快进度,也会从上次标记的迁移位置继续执行一次迁移的操作,真正的数据迁移调用的方法是evacuate。
func growWork(t *maptype,h *hmap,bucket uintptr){
//对当前要使用的桶进行迁移
evacuate(t,h,bucket&h.oldbucketmask())
// evacuate one more oldbucket to make progress on growing
if h.growing(){
//从迁移的标志位置继续迁移
evacuate(t,h,h.nevacuate)
}
}
func evacuate(t *maptype, h *hmap, oldbucket uintptr) {
//获得要迁移的旧桶
b := (*bmap)(add(h.oldbuckets, oldbucket*uintptr(t.bucketsize)))
//旧桶的数量
newbit := h.noldbuckets()
//桶里有数据则需要数据迁移
if !evacuated(b) {
//定义一个大小为2的evacDst,x分别映射新桶的低位,y映射新桶的高位,这个会详细解释
var xy [2]evacDst
x := &xy[0]
x.b = (*bmap)(add(h.buckets, oldbucket*uintptr(t.bucketsize)))
x.k = add(unsafe.Pointer(x.b), dataOffset)
x.e = add(x.k, bucketCnt*uintptr(t.keysize))
//如果是2倍扩容,则要映射高位,等量扩容则不需要一一对应
if !h.sameSizeGrow() {
y := &xy[1]
y.b = (*bmap)(add(h.buckets, (oldbucket+newbit)*uintptr(t.bucketsize)))
y.k = add(unsafe.Pointer(y.b), dataOffset)
y.e = add(y.k, bucketCnt*uintptr(t.keysize))
}
//遍历旧桶
for ; b != nil; b = b.overflow(t) {
k := add(unsafe.Pointer(b), dataOffset)
e := add(k, bucketCnt*uintptr(t.keysize))
for i := 0; i < bucketCnt; i, k, e = i+1, add(k, uintptr(t.keysize)), add(e, uintptr(t.elemsize)) {
top := b.tophash[i]
if isEmpty(top) {
b.tophash[i] = evacuatedEmpty
continue
}
if top < minTopHash {
throw("bad map state")
}
k2 := k
if t.indirectkey() {
k2 = *((*unsafe.Pointer)(k2))
}
var useY uint8
//如果是2倍扩容,通过hash计算是插入低位还是高位
if !h.sameSizeGrow() {
hash := t.hasher(k2, uintptr(h.hash0))
if h.flags&iterator != 0 && !t.reflexivekey() && !t.key.equal(k2, k2) {
useY = top & 1
top = tophash(hash)
} else {
if hash&newbit != 0 {
useY = 1
}
}
}
if evacuatedX+1 != evacuatedY || evacuatedX^1 != evacuatedY {
}
b.tophash[i] = evacuatedX + useY // evacuatedX + 1 == evacuatedY
dst := &xy[useY] // evacuation destination
//计算出新桶的低位或高位插入之后,将数据进行迁移,正常桶转移完转移溢出桶的数据
if dst.i == bucketCnt {
dst.b = h.newoverflow(t, dst.b)//获取一个溢出桶
dst.i = 0
dst.k = add(unsafe.Pointer(dst.b), dataOffset)
dst.e = add(dst.k, bucketCnt*uintptr(t.keysize))
}
//保存tophash,并复制key和value的数据
dst.b.tophash[dst.i&(bucketCnt-1)] = top
if t.indirectkey() {
*(*unsafe.Pointer)(dst.k) = k2 // copy pointer
} else {
typedmemmove(t.key, dst.k, k) // copy elem
}
if t.indirectelem() {
*(*unsafe.Pointer)(dst.e) = *(*unsafe.Pointer)(e)
} else {
typedmemmove(t.elem, dst.e, e)
}
dst.i++
dst.k = add(dst.k, uintptr(t.keysize))
dst.e = add(dst.e, uintptr(t.elemsize))
}
}
//释放旧桶的数据
if h.flags&oldIterator == 0 && t.bucket.ptrdata != 0 {
b := add(h.oldbuckets, oldbucket*uintptr(t.bucketsize))
ptr := add(b, dataOffset)
n := uintptr(t.bucketsize) - dataOffset
memclrHasPointers(ptr, n)
}
}
//标记转移的位置,方便下次迁移
if oldbucket == h.nevacuate {
advanceEvacuationMark(h, t, newbit)
}
}
- 获取指定要迁移的旧桶,定义一个[2]evacDst,如果是等量扩容,旧桶和新桶的插入的序号是一样的。如果是2倍扩容,旧桶迁移到新桶可能会对应插入的低位和高位,用evacDst分别映射低位和高位的桶地址,做好迁移的准备。
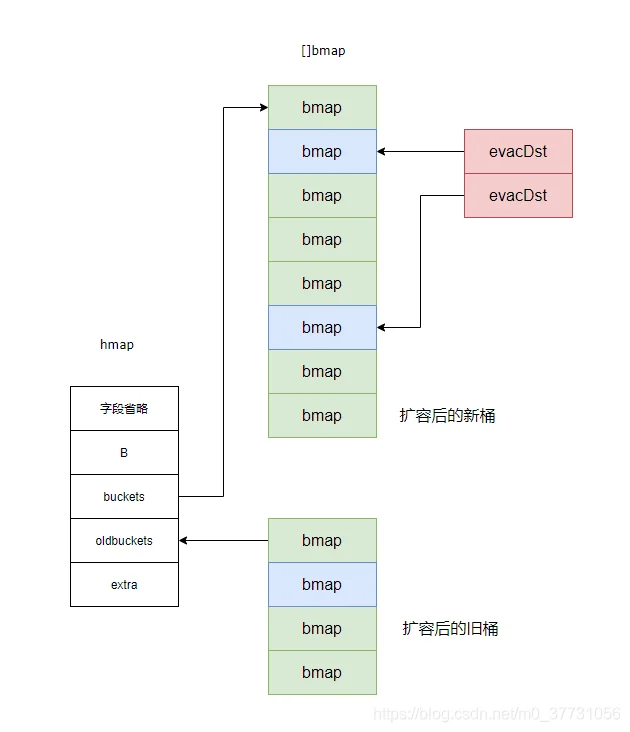
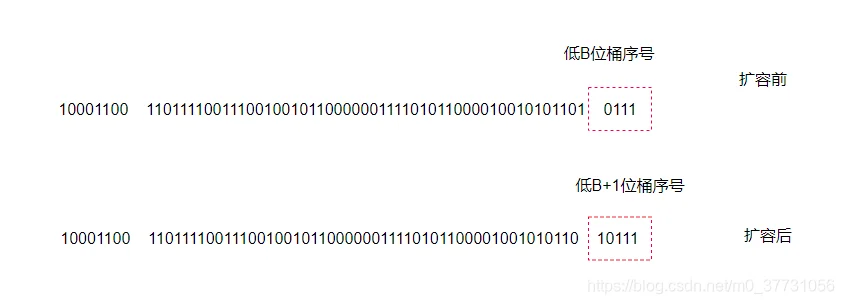
2倍扩容之后桶数据的迁移为什么会对应低位和高位两个位置?
上面提到,桶得序号是由hash的低B位计算出来的,当桶发生扩容之后B指数比原来加一,经过计算桶的序号可能发生改变,这个取决于第低B位的值是0还是1,例如假设未扩容前有2的4次方个桶,计算hash的低4为0111,即桶的序号为7,这时候发生扩容,桶的数量变为2的5次方个桶,这时候桶的序号变为取hash的低5位,即10111,桶的序号变为7+16(旧桶的个数),即是23号桶,另外一种,假设新的桶的低B位还是00111,那么迁移到新桶的序号就是和旧桶是一样的,还是序号7。
- 遍历旧桶的数据,获取key的hash并计算插入映射到新桶的evacDst低位还是高位,然后进行迁移操作,更新tophash并复制key和value的值。
- 如果溢出桶有数据也会遍历溢出桶数据进行迁移操作,原理同上。
- 桶的数据迁移完后旧桶的将会被释放并对数据迁移的位置做上标记,下次迁移方便从标记继续执行迁移。
如果你熟悉了上面的写入、扩容、迁移的过程,后面的写入就会非常容易理解。
查找
go的哈希查找有两种方式,一种是不返回ok的对应的源码方法为runtime.mapaccess1,另外返回ok的函数对应源码方法为runtime.mapaccess2,两种实现基本相同,下面以runtime.mapaccess2为例。
v,_ := map[key]
v,ok := map[key]
func mapaccess2(t *maptype, h *hmap, key unsafe.Pointer) (unsafe.Pointer, bool) {
.....
//得到hash并计算出桶得序号
hash := t.hasher(key, uintptr(h.hash0))
m := bucketMask(h.B)
b := (*bmap)(unsafe.Pointer(uintptr(h.buckets) + (hash&m)*uintptr(t.bucketsize)))
//如果旧桶有数据且未发生数据迁移,那么切换到旧桶里去找数据
if c := h.oldbuckets; c != nil {
if !h.sameSizeGrow() {
// There used to be half as many buckets; mask down one more power of two.
m >>= 1
}
oldb := (*bmap)(unsafe.Pointer(uintptr(c) + (hash&m)*uintptr(t.bucketsize)))
if !evacuated(oldb) {
b = oldb
}
}
top := tophash(hash)
bucketloop:
//遍历桶
for ; b != nil; b = b.overflow(t) {
for i := uintptr(0); i < bucketCnt; i++ {
//如果tophash不相等并且桶内没有元素,那么跳出循环不再遍历,说明没有找到想要的元素
if b.tophash[i] != top {
if b.tophash[i] == emptyRest {
break bucketloop
}
continue
}
//tophash相等,找到对应的元素
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
if t.indirectkey() {
k = *((*unsafe.Pointer)(k))
}
//判断key值是否相等,如果相等,则返回value值
if t.key.equal(key, k) {
e := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.elemsize))
if t.indirectelem() {
e = *((*unsafe.Pointer)(e))
}
return e, true
}
}
}
return unsafe.Pointer(&zeroVal[0]), false
}
删除
func mapdelete(t *maptype, h *hmap, key unsafe.Pointer) {
.....
hash := t.hasher(key, uintptr(h.hash0))
bucket := hash & bucketMask(h.B)
//如果正在扩容,那么对数据进行迁移
if h.growing() {
growWork(t, h, bucket)
}
b := (*bmap)(add(h.buckets, bucket*uintptr(t.bucketsize)))
bOrig := b
top := tophash(hash)
search:
//遍历桶
for ; b != nil; b = b.overflow(t) {
for i := uintptr(0); i < bucketCnt; i++ {
//如果tophash不相等并且桶内没有元素,那么跳出循环不再遍历,说明没有找到想要的元素
if b.tophash[i] != top {
if b.tophash[i] == emptyRest {
break search
}
continue
}
//tophash相等,找到对应的元素
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
k2 := k
if t.indirectkey() {
k2 = *((*unsafe.Pointer)(k2))
}
if !t.key.equal(key, k2) {
continue
}
//对key值的空间清空并释放
if t.indirectkey() {
*(*unsafe.Pointer)(k) = nil
} else if t.key.ptrdata != 0 {
memclrHasPointers(k, t.key.size)
}
//对value值的空间清空并释放
e := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.elemsize))
if t.indirectelem() {
*(*unsafe.Pointer)(e) = nil
} else if t.elem.ptrdata != 0 {
memclrHasPointers(e, t.elem.size)
} else {
memclrNoHeapPointers(e, t.elem.size)
}
//设置tophash为空
b.tophash[i] = emptyOne
notLast:
h.count-- //元素个数减一
break search
}
}
if h.flags&hashWriting == 0 {
throw("concurrent map writes")
}
h.flags &^= hashWriting
}
特定类型的数据优化
在哈希表的读取、写入、删除、数据迁移的时候,会针对特定或常用的数据类型进行优化,比如uint64,uint32,string类型等,因为是特定的数据类型,所以可以节省很多操作,优化效率,有兴趣的同学可以自己找来看看,这里不再做讲解。
| key类型 | 源码文件 |
|---|---|
| uint64 | runtime/map_fast64.go |
| uint32 | runtime/map_fast32.go |
| string | runtime/map_faststr.go |
更多欢迎关注go成神之路