
在早期,CPU都是以单核的形式顺序执行机器指令。Go语言的祖先C语言正是这种顺序编程语言的代表。顺序编程语言中的顺序是指:所有的指令都是以串行的方式执行,在相同的时刻有且仅有一个CPU在顺序执行程序的指令。
随着处理器技术的发展,单核时代以提升处理器频率来提高运行效率的方式遇到了瓶颈,目前各种主流的CPU频率基本被锁定在了3GHZ附近。单核CPU的发展的停滞,给多核CPU的发展带来了机遇。相应地,编程语言也开始逐步向并行化的方向发展。Go语言正是在多核和网络化的时代背景下诞生的原生支持并发的编程语言。
常见的并行编程有多种模型,主要有多线程、消息传递等。从理论上来看,多线程和基于消息的并发编程是等价的。由于多线程并发模型可以自然对应到多核的处理器,主流的操作系统因此也都提供了系统级的多线程支持,同时从概念上讲多线程似乎也更直观,因此多线程编程模型逐步被吸纳到主流的编程语言特性或语言扩展库中。而主流编程语言对基于消息的并发编程模型支持则相比较少,Erlang语言是支持基于消息传递并发编程模型的代表者,它的并发体之间不共享内存。Go语言是基于消息并发模型的集大成者,它将基于CSP模型的并发编程内置到了语言中,通过一个go关键字就可以轻易地启动一个Goroutine,与Erlang不同的是Go语言的Goroutine之间是共享内存的。
1.5.1 Goroutine和系统线程
Goroutine是Go语言特有的并发体,是一种轻量级的线程,由go关键字启动。在真实的Go语言的实现中,goroutine和系统线程也不是等价的。尽管两者的区别实际上只是一个量的区别,但正是这个量变引发了Go语言并发编程质的飞跃。
首先,每个系统级线程都会有一个固定大小的栈(一般默认可能是2MB),这个栈主要用来保存函数递归调用时参数和局部变量。固定了栈的大小导致了两个问题:一是对于很多只需要很小的栈空间的线程来说是一个巨大的浪费,二是对于少数需要巨大栈空间的线程来说又面临栈溢出的风险。针对这两个问题的解决方案是:要么降低固定的栈大小,提升空间的利用率;要么增大栈的大小以允许更深的函数递归调用,但这两者是没法同时兼得的。相反,一个Goroutine会以一个很小的栈启动(可能是2KB或4KB),当遇到深度递归导致当前栈空间不足时,Goroutine会根据需要动态地伸缩栈的大小(主流实现中栈的最大值可达到1GB)。因为启动的代价很小,所以我们可以轻易地启动成千上万个Goroutine。
runtime.GOMAXPROCS在Go语言中启动一个Goroutine不仅和调用函数一样简单,而且Goroutine之间调度代价也很低,这些因素极大地促进了并发编程的流行和发展。
1.5.2 原子操作
所谓的原子操作就是并发编程中“最小的且不可并行化”的操作。通常,如果多个并发体对同一个共享资源进行的操作是原子的话,那么同一时刻最多只能有一个并发体对该资源进行操作。从线程角度看,在当前线程修改共享资源期间,其它的线程是不能访问该资源的。原子操作对于多线程并发编程模型来说,不会发生有别于单线程的意外情况,共享资源的完整性可以得到保证。
sync.Muteximport (
"sync"
)
var total struct {
sync.Mutex
value int
}
func worker(wg *sync.WaitGroup) {
defer wg.Done()
for i := 0; i <= 100; i++ {
total.Lock()
total.value += i
total.Unlock()
}
}
func main() {
var wg sync.WaitGroup
wg.Add(2)
go worker(&wg)
go worker(&wg)
wg.Wait()
fmt.Println(total.value)
}workertotal.value += isync.Mutextotalsync/atomicimport (
"sync"
"sync/atomic"
)
var total uint64
func worker(wg *sync.WaitGroup) {
defer wg.Done()
var i uint64
for i = 0; i <= 100; i++ {
atomic.AddUint64(&total, i)
}
}
func main() {
var wg sync.WaitGroup
wg.Add(2)
go worker(&wg)
go worker(&wg)
wg.Wait()
}atomic.AddUint64total原子操作配合互斥锁可以实现非常高效的单件模式。互斥锁的代价比普通整数的原子读写高很多,在性能敏感的地方可以增加一个数字型的标志位,通过原子检测标志位状态降低互斥锁的使用次数来提高性能。
type singleton struct {}
var (
instance *singleton
initialized uint32
mu sync.Mutex
)
func Instance() *singleton {
if atomic.LoadUint32(&initialized) == 1 {
return instance
}
mu.Lock()
defer mu.Unlock()
if instance == nil {
defer atomic.StoreUint32(&initialized, 1)
instance = &singleton{}
}
return instance
}sync.Oncetype Once struct {
m Mutex
done uint32
}
func (o *Once) Do(f func()) {
if atomic.LoadUint32(&o.done) == 1 {
return
}
o.m.Lock()
defer o.m.Unlock()
if o.done == 0 {
defer atomic.StoreUint32(&o.done, 1)
f()
}
}sync.Oncevar (
instance *singleton
once sync.Once
)
func Instance() *singleton {
once.Do(func() {
instance = &singleton{}
})
return instance
}sync/atomicatomic.ValueLoadStoreinterface{}var config atomic.Value // 保存当前配置信息
// 初始化配置信息
config.Store(loadConfig())
// 启动一个后台线程, 加载更新后的配置信息
go func() {
for {
time.Sleep(time.Second)
config.Store(loadConfig())
}
}()
// 用于处理请求的工作者线程始终采用最新的配置信息
for i := 0; i < 10; i++ {
go func() {
for r := range requests() {
c := config.Load()
// ...
}
}()
}这是一个简化的生产者消费者模型:后台线程生成最新的配置信息;前台多个工作者线程获取最新的配置信息。所有线程共享配置信息资源。
1.5.3 顺序一致性内存模型
如果只是想简单地在线程之间进行数据同步的话,原子操作已经为编程人员提供了一些同步保障。不过这种保障有一个前提:顺序一致性的内存模型。要了解顺序一致性,我们先看看一个简单的例子:
var a string
var done bool
func setup() {
a = "hello, world"
done = true
}
func main() {
go setup()
for !done {}
print(a)
}setupadonetruemainfor !done {}donetruemaindoneasetupdonemainmain在Go语言中,同一个Goroutine线程内部,顺序一致性内存模型是得到保证的。但是不同的Goroutine之间,并不满足顺序一致性内存模型,需要通过明确定义的同步事件来作为同步的参考。如果两个事件不可排序,那么就说这两个事件是并发的。为了最大化并行,Go语言的编译器和处理器在不影响上述规定的前提下可能会对执行语句重新排序(CPU也会对一些指令进行乱序执行)。
a = 1; b = 2;a = 1;b = 2;b = 2;a = 1;a = 1; b = 2;func main() {
go println("你好, 世界")
}mainmain用前面的原子操作并不能解决问题,因为我们无法确定两个原子操作之间的顺序。解决问题的办法就是通过同步原语来给两个事件明确排序:
func main() {
done := make(chan int)
go func(){
println("你好, 世界")
done <- 1
}()
<-done
}<-donedone <- 1done <- 1println("你好, 世界")sync.Mutexfunc main() {
var mu sync.Mutex
mu.Lock()
go func(){
println("你好, 世界")
mu.Unlock()
}()
mu.Lock()
}mu.Unlock()println("你好, 世界")mainmu.Lock()mu.Unlock()sync.Mutex1.5.4 初始化顺序
前面函数章节中我们已经简单介绍过程序的初始化顺序,这是属于Go语言面向并发的内存模型的基础规范。
main.mainmainmaininitinitinitinitmaininitmain.main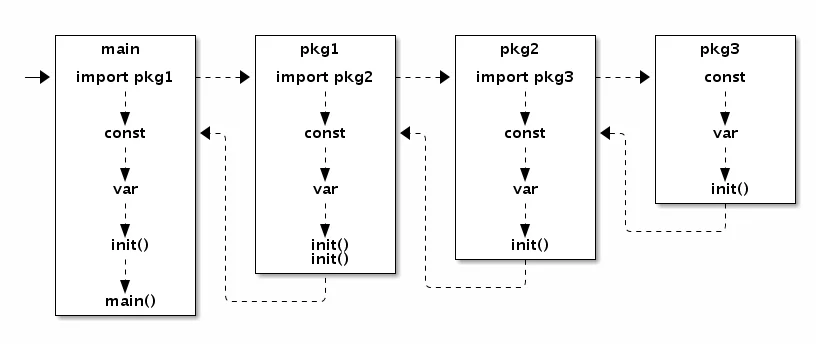
图 1-12 包初始化流程
main.maininitmain.maininitmain1.5.5 Goroutine的创建
govar a string
func f() {
print(a)
}
func hello() {
a = "hello, world"
go f()
}go f()hellohellof()hellohello"hello, world"hello1.5.6 基于Channel的通信
Channel通信是在Goroutine之间进行同步的主要方法。在无缓存的Channel上的每一次发送操作都有与其对应的接收操作相配对,发送和接收操作通常发生在不同的Goroutine上(在同一个Goroutine上执行2个操作很容易导致死锁)。无缓存的Channel上的发送操作总在对应的接收操作完成前发生.
var done = make(chan bool)
var msg string
func aGoroutine() {
msg = "你好, 世界"
done <- true
}
func main() {
go aGoroutine()
<-done
println(msg)
}msgdonedoneprintlnclose(c)done <- falsevar done = make(chan bool)
var msg string
func aGoroutine() {
msg = "你好, 世界"
close(done)
}
func main() {
go aGoroutine()
<-done
println(msg)
}对于从无缓冲Channel进行的接收,发生在对该Channel进行的发送完成之前。
基于上面这个规则可知,交换两个Goroutine中的接收和发送操作也是可以的(但是很危险):
var done = make(chan bool)
var msg string
func aGoroutine() {
msg = "hello, world"
<-done
}
func main() {
go aGoroutine()
done <- true
println(msg)
}maindone <- true<-donemsg = "hello, world"println(msg)msgdonemaindoneprintlndone = make(chan bool, 1)maindone <- true<-doneKK+CCC我们可以根据控制Channel的缓存大小来控制并发执行的Goroutine的最大数目, 例如:
var limit = make(chan int, 3)
func main() {
for _, w := range work {
go func() {
limit <- 1
w()
<-limit
}()
}
select{}
}select{}mainfor{}<-make(chan int)mainos.Exit(0)1.5.7 不靠谱的同步
前面我们已经分析过,下面代码无法保证正常打印结果。实际的运行效果也是大概率不能正常输出结果。
func main() {
go println("你好, 世界")
}刚接触Go语言的话,可能希望通过加入一个随机的休眠时间来保证正常的输出:
func main() {
go println("hello, world")
time.Sleep(time.Second)
}mainprintlnmainmainmainsync解决同步问题的思路是相同的:使用显式的同步。
总结:
1.goroutine的使用要注意cpu原子指令的重排序,所以要是用channel或者加锁来保证数据的可见性
2.java多线程的volatite可以保证全局变量的线程可见性(这个感觉也是java的优点吧)
3.java 同步和go互斥锁相对应,java unsafe的cas和go的atomic对应