
0 前言
本文主体内容分两部分:
第一部分谈及 golang 最常用的互斥锁 sync.Mutex 的实现原理;
第二部分则是以 Mutex 为基础,进一步介绍读写锁 sync.RWMutex 的实现原理.
1 Sync.Mutex
1.1 Mutex 核心机制
1.1.1 上锁/解锁
遵循由简入繁的思路,我们首先忽略大量的实现细节以及基于并发安全角度的逻辑考量,思考实现一把锁最简单纯粹的主干流程:
(1)通过 Mutex 内一个状态值标识锁的状态,例如,取 0 表示未加锁,1 表示已加锁;
(2)上锁:把 0 改为 1;
(3)解锁:把 1 置为 0.
(4)上锁时,假若已经是 1,则上锁失败,需要等他人解锁,将状态改为 0.
Mutex 整体流程的骨架便是如此,接下来,我们就不断填充血肉、丰富细节.
1.1.2 由自旋到阻塞的升级过程
一个优先的工具需要具备探测并适应环境,从而采取不同对策因地制宜的能力.
针对 goroutine 加锁时发现锁已被抢占的这种情形,此时摆在面前的策略有如下两种:
(1)阻塞/唤醒:将当前 goroutine 阻塞挂起,直到锁被释放后,以回调的方式将阻塞 goroutine 重新唤醒,进行锁争夺;
(2)自旋 + CAS:基于自旋结合 CAS 的方式,重复校验锁的状态并尝试获取锁,始终把主动权握在手中.
上述方案各有优劣,且有其适用的场景:
| 锁竞争方案 | 优势 | 劣势 | 适用场景 |
| 阻塞/唤醒 | 精准打击,不浪费 CPU 时间片 | 需要挂起协程,进行上下文切换,操作较重 | 并发竞争激烈的场景 |
| 自旋+CAS | 无需阻塞协程,短期来看操作较轻 | 长时间争而不得,会浪费 CPU 时间片 | 并发竞争强度低的场景 |
sync.Mutex 结合两种方案的使用场景,制定了一个锁升级的过程,反映了面对并发环境通过持续试探逐渐由乐观逐渐转为悲观的态度,具体方案如下:
(1)首先保持乐观,goroutine 采用自旋 + CAS 的策略争夺锁;
(2)尝试持续受挫达到一定条件后,判定当前过于激烈,则由自旋转为 阻塞/挂起模式.
上面谈及到的由自旋模式转为阻塞模式的具体条件拆解如下:
(1)自旋累计达到 4 次仍未取得战果;
(2)CPU 单核或仅有单个 P 调度器;(此时自旋,其他 goroutine 根本没机会释放锁,自旋纯属空转);
(3)当前 P 的执行队列中仍有待执行的 G. (避免因自旋影响到 GMP 调度效率).
1.1.3 饥饿模式
1.1.2 小节的升级策略主要面向性能问题. 本小节引入的【饥饿模式】概念,则是展开对【公平性】的问题探讨.
下面首先拎清两个概念:
(1)饥饿:顾名思义,是因为非公平机制的原因,导致 Mutex 阻塞队列中存在 goroutine 长时间取不到锁,从而陷入饥荒状态;
(2)饥饿模式:当 Mutex 阻塞队列中存在处于饥饿态的 goroutine 时,会进入模式,将抢锁流程由非公平机制转为公平机制.
在 sync.Mutex 运行过程中存在两种模式:
(1)正常模式/非饥饿模式:这是 sync.Mutex 默认采用的模式. 当有 goroutine 从阻塞队列被唤醒时,会和此时先进入抢锁流程的 goroutine 进行锁资源的争夺,假如抢锁失败,会重新回到阻塞队列头部.
值得一提的是,此时被唤醒的老 goroutine 相比新 goroutine 是处于劣势地位,因为新 goroutine 已经在占用 CPU 时间片,且新 goroutine 可能存在多个,从而形成多对一的人数优势,因此形势对老 goroutine 不利.
(2)饥饿模式:这是 sync.Mutex 为拯救陷入饥荒的老 goroutine 而启用的特殊机制,饥饿模式下,锁的所有权按照阻塞队列的顺序进行依次传递. 新 goroutine 进行流程时不得抢锁,而是进入队列尾部排队.
两种模式的转换条件:
(1)默认为正常模式;
(2)正常模式 -> 饥饿模式:当阻塞队列存在 goroutine 等锁超过 1ms 而不得,则进入饥饿模式;
(3)饥饿模式 -> 正常模式:当阻塞队列已清空,或取得锁的 goroutine 等锁时间已低于 1ms 时,则回到正常模式.
小结:正常模式灵活机动,性能较好;饥饿模式严格死板,但能捍卫公平的底线. 因此,两种模式的切换体现了 sync.Mutex 为适应环境变化,在公平与性能之间做出的调整与权衡. 回头观望,这一项因地制宜、随机应变的能力正是许多优秀工具所共有的特质.
1.1.4 goroutine 唤醒标识
为尽可能缓解竞争压力和性能损耗,sync.Mutex 会不遗余力在可控范围内减少一些无意义的并发竞争和操作损耗.
在实现上,sync.Mutex 通过一个 mutexWoken 标识位,标志出当前是否已有 goroutine 在自旋抢锁或存在 goroutine 从阻塞队列中被唤醒;倘若 mutexWoken 为 true,且此时有解锁动作发生时,就没必要再额外唤醒阻塞的 goroutine 从而引起竞争内耗.
1.2 数据结构
(1)state:锁中最核心的状态字段,不同 bit 位分别存储了 mutexLocked(是否上锁)、mutexWoken(是否有 goroutine 从阻塞队列中被唤醒)、mutexStarving(是否处于饥饿模式)的信息,具体在 1.2 节详细展开;
(2)sema:用于阻塞和唤醒 goroutine 的信号量.
1.2.1 几个全局常量
(1)mutexLocked = 1:state 最右侧的一个 bit 位标志是否上锁,0-未上锁,1-已上锁;
(2)mutexWoken = 2:state 右数第二个 bit 位标志是否有 goroutine 从阻塞中被唤醒,0-没有,1-有;
(3)mutexStarving = 4:state 右数第三个 bit 位标志 Mutex 是否处于饥饿模式,0-非饥饿,1-饥饿;
(4)mutexWaiterShift = 3:右侧存在 3 个 bit 位标识特殊信息,分别为上述的 mutexLocked、mutexWoken、mutexStarving;
(5)starvationThresholdNs = 1 ms:sync.Mutex 进入饥饿模式的等待时间阈值.
1.2.2 state 字段详述
Mutex.state 字段为 int32 类型,不同 bit 位具有不同的标识含义:
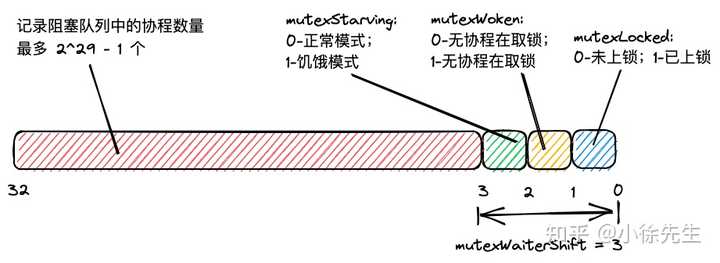
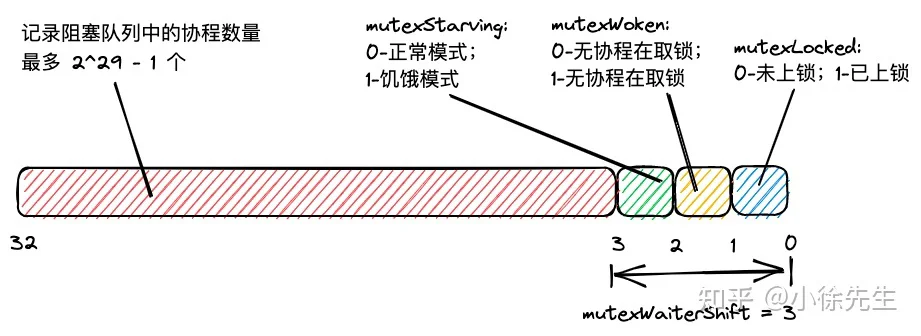
低 3 位分别标识 mutexLocked(是否上锁)、mutexWoken(是否有协程在抢锁)、mutexStarving(是否处于饥饿模式),高 29 位的值聚合为一个范围为 0~2^29-1 的整数,表示在阻塞队列中等待的协程个数.
后续在加锁/解锁处理流程中,会频繁借助位运算从 Mutex.state 字段中快速获取到以上信息,大家可以先对以下几个式子混个眼熟:
(1)state & mutexLocked:判断是否上锁;
(2)state | mutexLocked:加锁;
(3)state & mutexWoken:判断是否存在抢锁的协程;
(4)state | mutexWoken:更新状态,标识存在抢锁的协程;
(5)state &^ mutexWoken:更新状态,标识不存在抢锁的协程;
(&^ 是一种较少见的位操作符,以 x &^ y 为例,假如 y = 1,结果为 0;假若 y = 0,结果为 x)
(6)state & mutexStarving:判断是否处于饥饿模式;
(7)state | mutexStarving:置为饥饿模式;
(8)state >> mutexWaiterShif:获取阻塞等待的协程数;
(9)state += 1 << mutexWaiterShif:阻塞等待的协程数 + 1.
1.3 Mutex.Lock()
1.3.1 Lock 方法主干
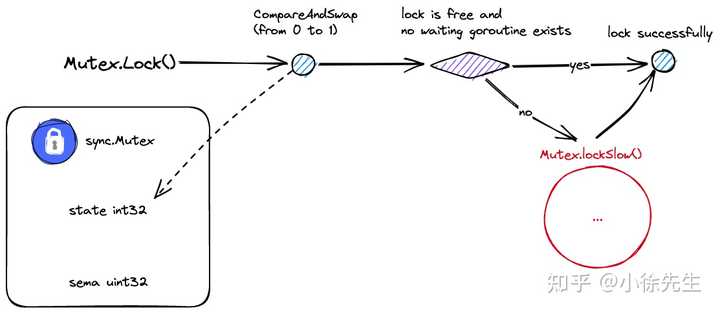
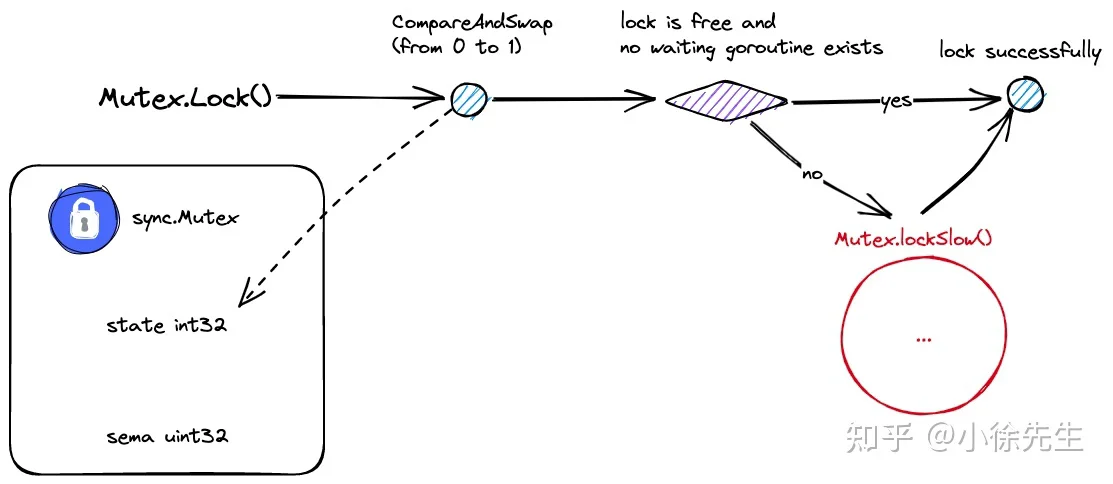
(1)首先进行一轮 CAS 操作,假如当前未上锁且锁内不存在阻塞协程,则直接 CAS 抢锁成功返回;
(2)第一轮初探失败,则进入 lockSlow 流程,下面细谈.
1.3.2 Mutex.lockSlow()
1.3.2.1 几个局部变量
(1)waitStartTime:标识当前 goroutine 在抢锁过程中的等待时长,单位:ns;
(2)starving:标识当前是否处于饥饿模式;
(3)awoke:标识当前是否已有协程在等锁;
(4)iter:标识当前 goroutine 参与自旋的次数;
(5)old:临时存储锁的 state 值.
1.3.2.2 自旋空转
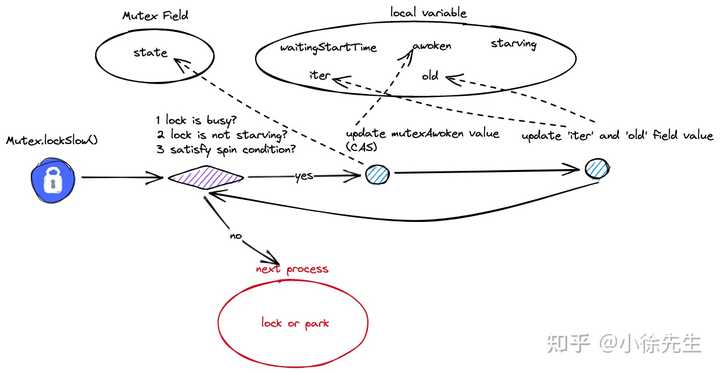
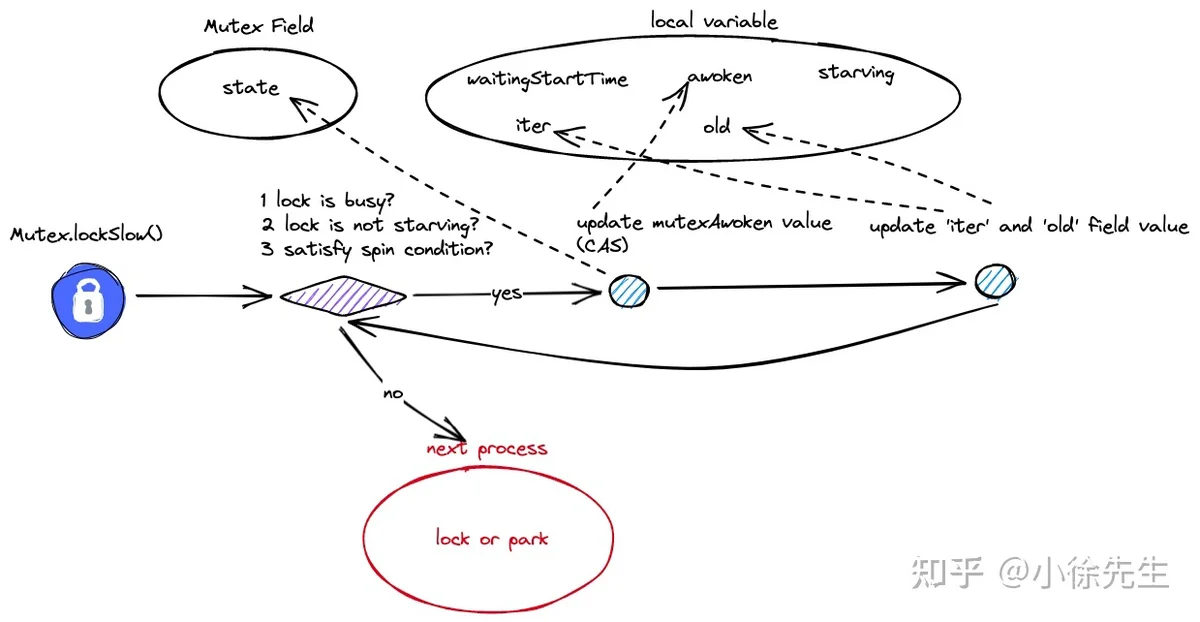
(1)走进 for 循环;
(2)假如满足三个条件:I 锁已被占用、 II 锁为正常模式、III 满足自旋条件(runtime_canSpin 方法),则进入自旋后处理环节;
(3)在自旋后处理中,假如当前锁有尚未唤醒的阻塞协程,则通过 CAS 操作将 state 的 mutexWoken 标识置为 1,将局部变量 awoke 置为 true;
(4)调用 runtime_doSpin 告知调度器 P 当前处于自旋模式;
(5)更新自旋次数 iter 和锁状态值 old;
(6)通过 continue 语句进入下一轮尝试.
1.3.2.3 state 新值构造
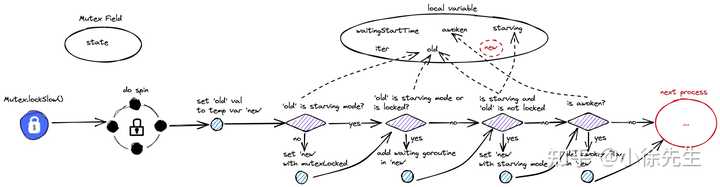
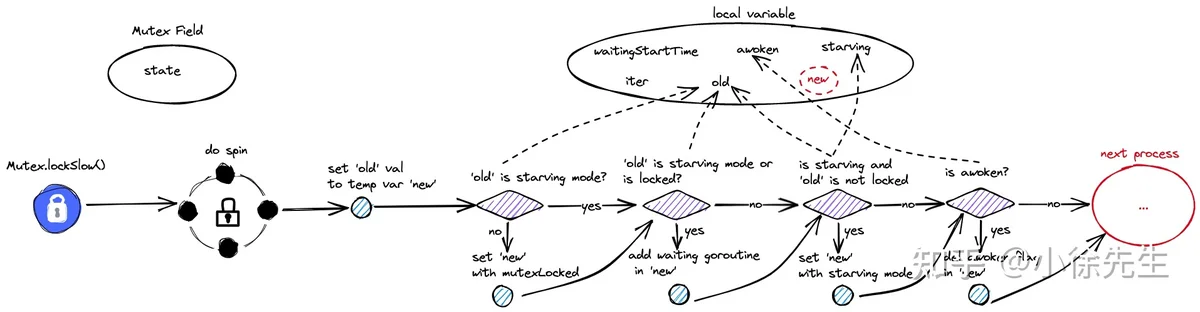
(1)从自旋中走出来后,会存在两种分支,要么加锁成功,要么陷入自锁,不论是何种情形,都会先对 sync.Mutex 的状态新值 new 进行更新;
(2)倘若当前是非饥饿模式,则在新值 new 中置为已加锁,即尝试抢锁;
(3)倘若旧值为已加锁或者处于饥饿模式,则当前 goroutine 在这一轮注定无法抢锁成功,可以直接令新值的阻塞协程数加1;
(4)倘若当前进入饥饿模式且旧值已加锁,则将新值置为饥饿模式;
(5)倘若局部变量标识是已有唤醒协程抢锁,说明 Mutex.state 中的 mutexWoken 是被当前 gouroutine 置为 1 的,但由于当前 goroutine 接下来要么抢锁成功,要么被阻塞挂起,因此需要在新值中将该 mutexWoken 标识更新置 0.
1.3.2.4 state 新旧值替换
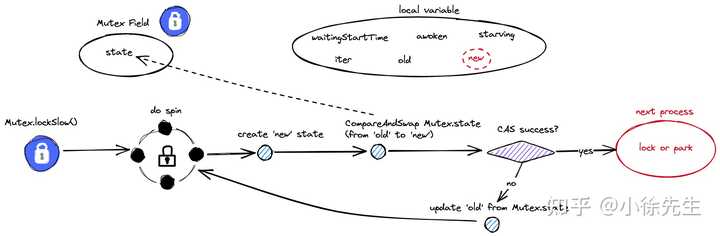
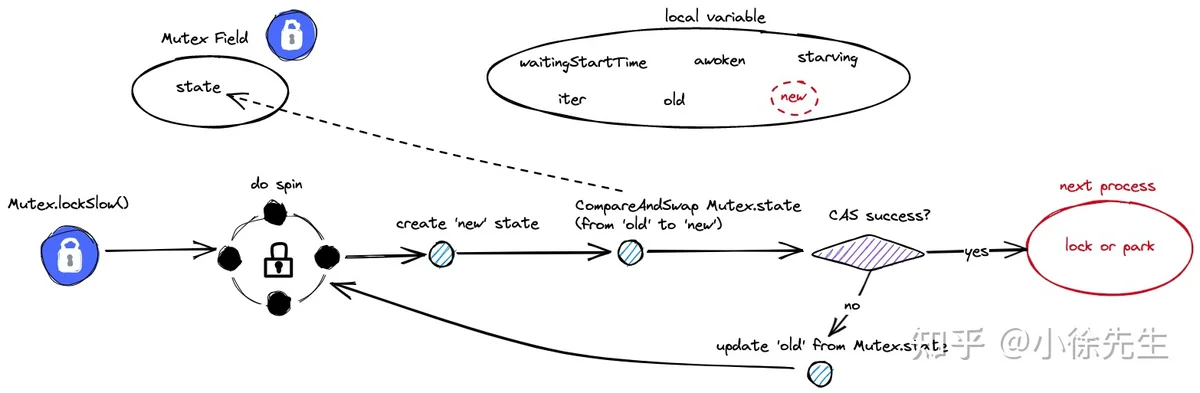
(1)通过 CAS 操作,用构造的新值替换旧值;
(2)倘若失败(即旧值被其他协程介入提前修改导致不符合预期),则将旧值更新为此刻的 Mutex.State,并开启一轮新的循环;
(3)倘若 CAS 替换成功,则进入最后一轮的二择一局面:I 倘若当前 goroutine 加锁成功,则返回;II 倘若失败,则将 goroutine 挂起添加到阻塞队列.
1.3.2.5 上锁成功分支
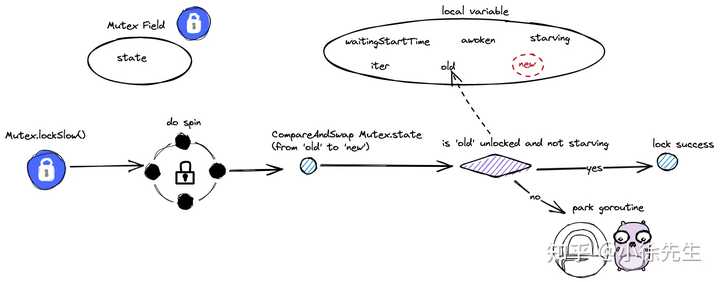
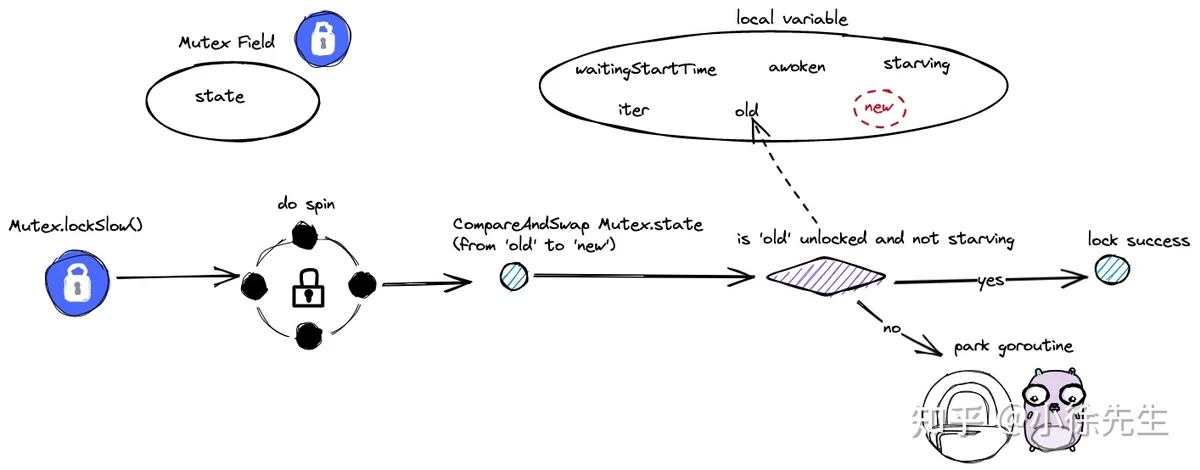
(1)延续 1.2.2.4 的思路,此时已经成功将 Mutex.state 由旧值替换为新值;
(2)接下来进行判断,倘若旧值是未加锁状态且为正常模式,则意味着加锁标识位正是由当前 goroutine 完成的更新,说明加锁成功,返回即可;
(3)倘若旧值中锁未释放或者处于饥饿模式,则当前 goroutine 需要进入阻塞队列挂起.
1.3.2.6 阻塞挂起
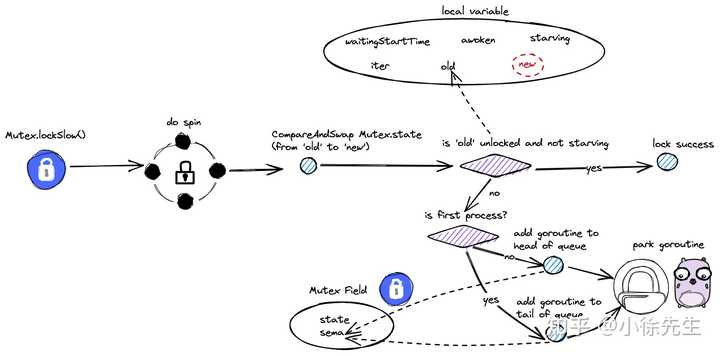
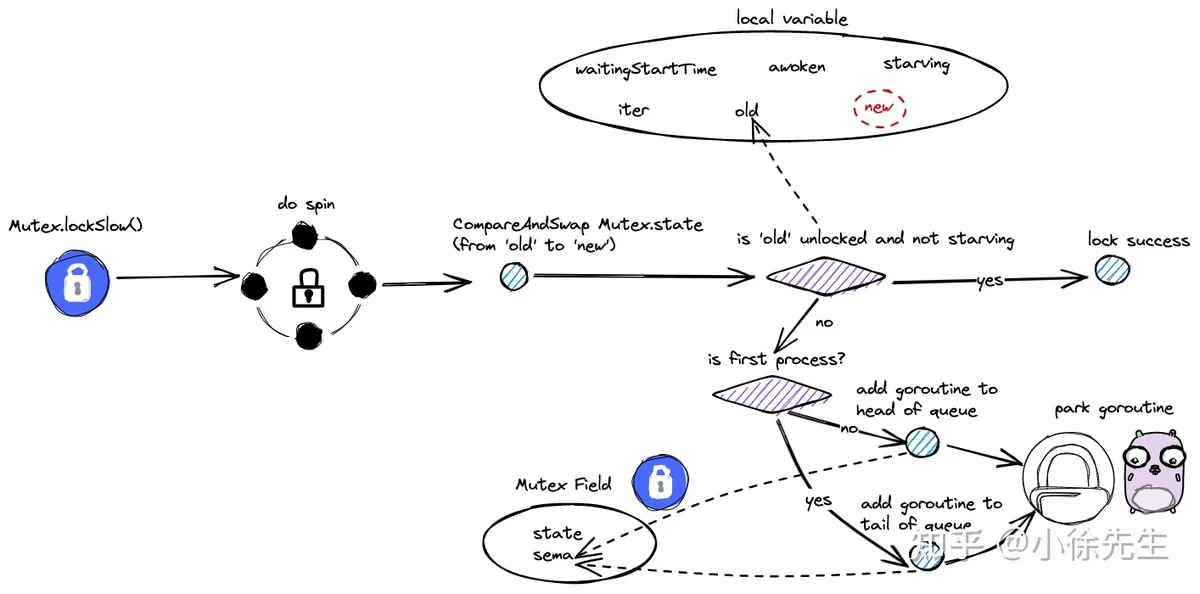
承接上节,走到此处的情形有两种:要么是抢锁失败,要么是锁已处于饥饿模式,而当前 goroutine 不是从阻塞队列被唤起的协程. 不论处于哪种情形,当前 goroutine 都面临被阻塞挂起的命运.
(1)基于 queueLifo 标识当前 goroutine 是从阻塞队列被唤起的老客还是新进流程的新客;
(2)倘若等待的起始时间为零,则为新客;倘若非零,则为老客;
(3)倘若是新客,则对等待的起始时间进行更新,置为当前时刻的 ns 时间戳;
(4)将当前协程添加到阻塞队列中,倘若是老客则挂入队头;倘若是新客,则挂入队尾;
(5)挂起当前协程.
1.3.2.7 从阻塞态被唤醒
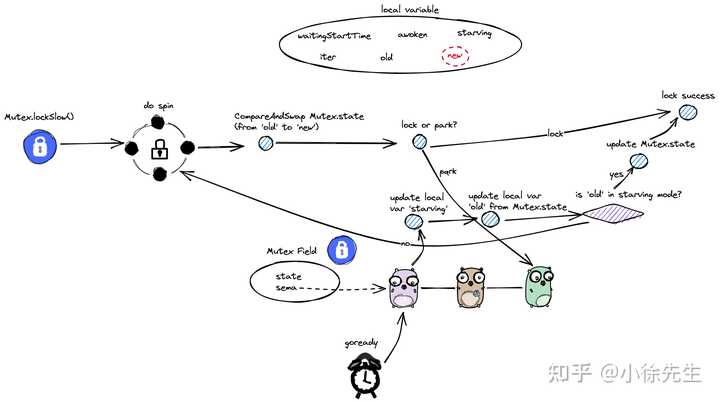
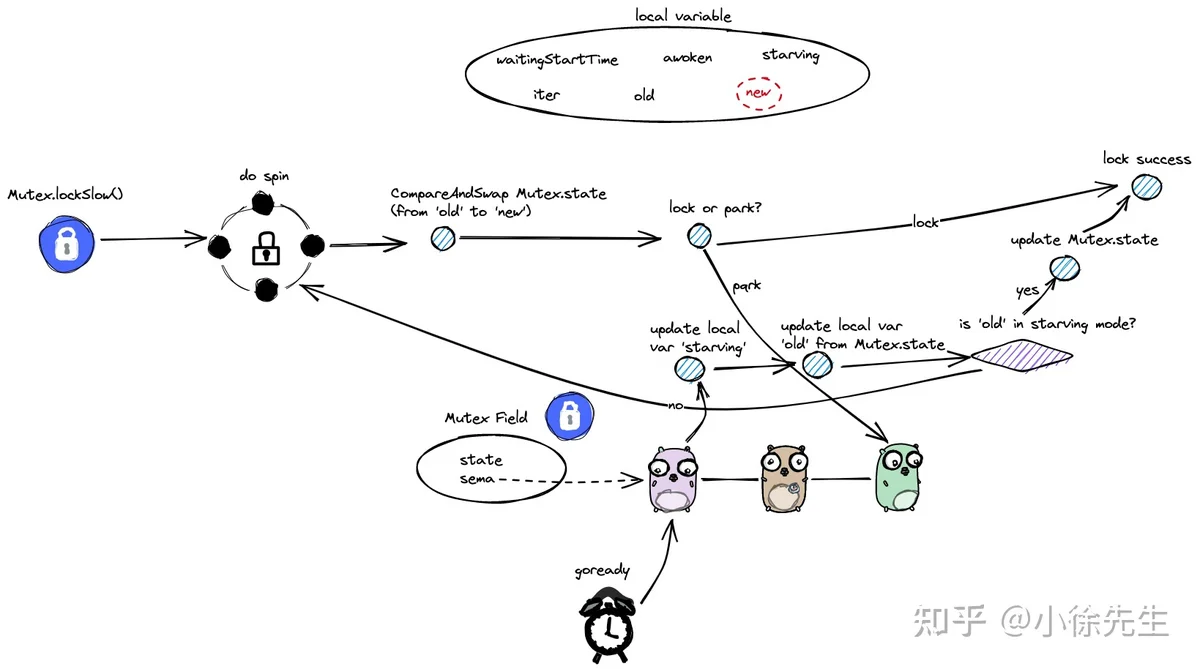
(1)走入此处,说明当前 goroutine 是从 Mutex 的阻塞队列中被唤起的;
(2)判断一下,此刻需要进入阻塞态,倘若当前 goroutine 进入阻塞队列时间长达 1 ms,则说明需要;此时会更新 starving 局部变量,并在下一轮循环中完成对 Mutex.state 中 starving 标识位的更新;
(3)获取此时锁的状态,通过 old 存储;
(4)倘若此时锁是饥饿模式,则当前 goroutine 无需竞争可以直接获得锁;
(5)饥饿模式下,goroutine 获取锁前需要更新锁的状态,包含 mutexLocked、锁阻塞队列等待协程数以及 mutexStarving 三个信息;均通过 delta 变量记录差值,最终通过原子操作添加到 Mutex.state 中;
(6)mutexStarving 的更新要作前置判断,倘若当前局部变量 starving 为 false,或者当前 goroutine 就是 Mutex 阻塞队列的最后一个 goroutine,则将 Mutex.state 置为正常模式.
1.4 Unlock
1.4.1 Unlock 方法主干
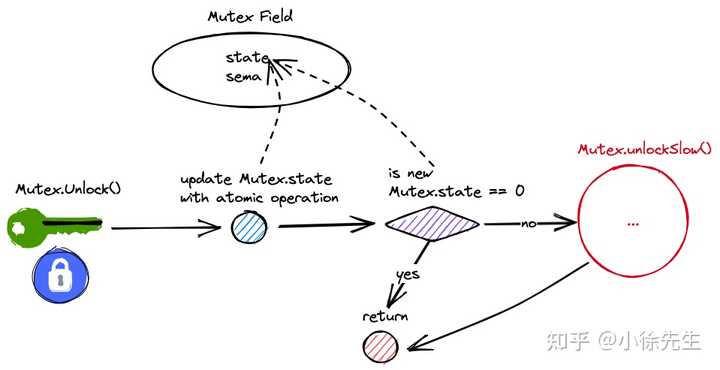
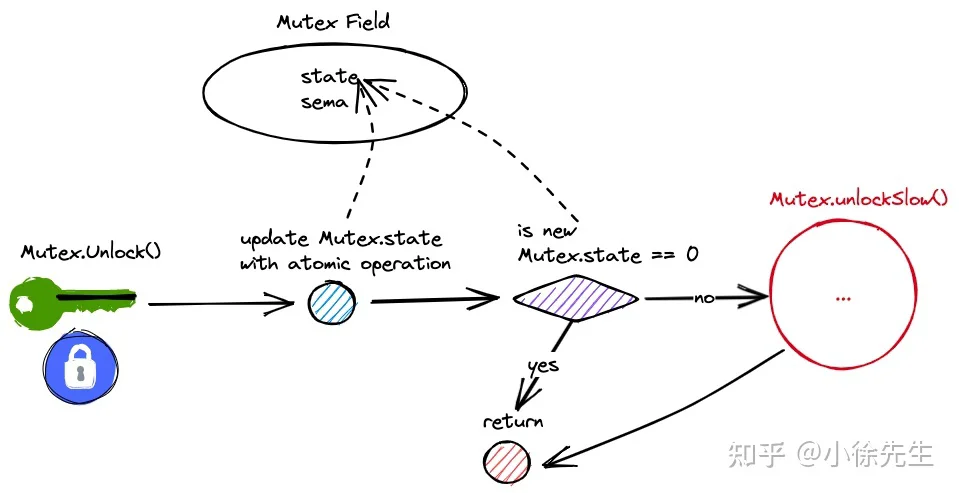
(1)通过原子操作解锁;
(2)倘若解锁时发现,目前参与竞争的仅有自身一个 goroutine,则直接返回即可;
(3)倘若发现锁中还有阻塞协程,则走入 unlockSlow 分支.
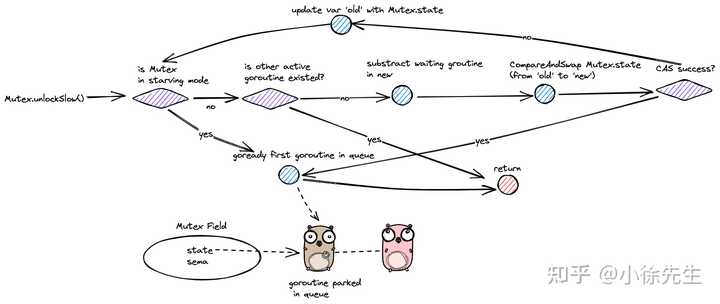
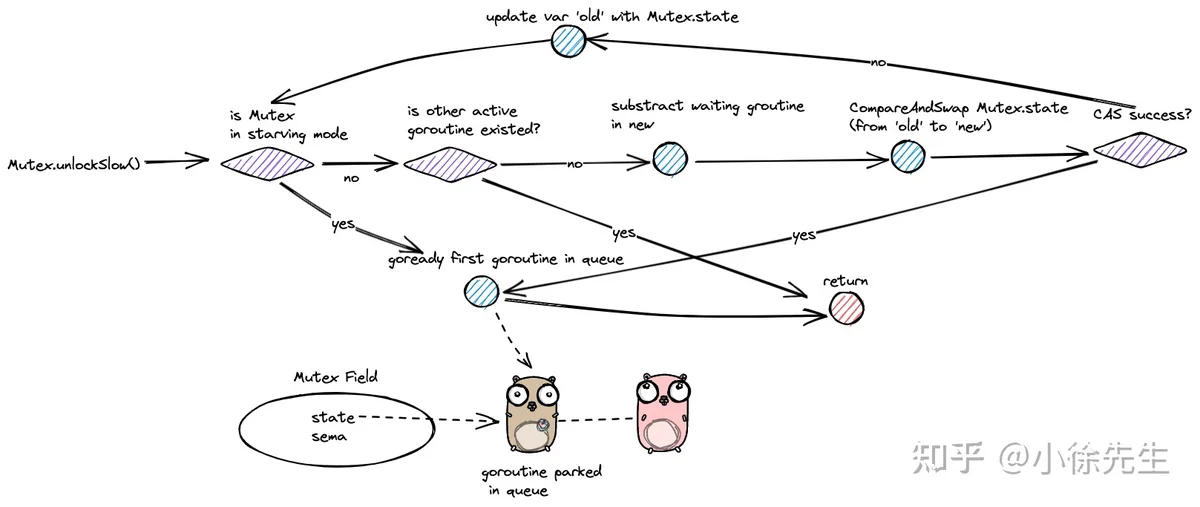
1.4.2 unlockSlow
1.4.2.1 未加锁的异常情形
解锁时倘若发现 Mutex 此前未加锁,直接抛出 fatal.
1.4.2.2 正常模式
(1)倘若阻塞队列内无 goroutine 或者 mutexLocked、mutexStarving、mutexWoken 标识位任一不为零,三者均说明此时有其他活跃协程已介入,自身无需关心后续流程;
(2)基于 CAS 操作将 Mutex.state 中的阻塞协程数减 1,倘若成功,则唤起阻塞队列头部的 goroutine,并退出;
(3)倘若减少阻塞协程数的 CAS 操作失败,则更新此时的 Mutex.state 为新的 old 值,开启下一轮循环.
1.4.2.3 饥饿模式
饥饿模式下,直接唤醒阻塞队列头部的 goroutine 即可.
2 Sync.RWMutex
2.1 核心机制
(1)从逻辑上,可以把 RWMutex 理解为一把读锁加一把写锁;
(2)写锁具有严格的排他性,当其被占用,其他试图取写锁或者读锁的 goroutine 均阻塞;
(3)读锁具有有限的共享性,当其被占用,试图取写锁的 goroutine 会阻塞,试图取读锁的 goroutine 可与当前 goroutine 共享读锁;
(4)综上可见,RWMutex 适用于读多写少的场景,最理想化的情况,当所有操作均使用读锁,则可实现去无化;最悲观的情况,倘若所有操作均使用写锁,则 RWMutex 退化为普通的 Mutex.
2.2 数据结构
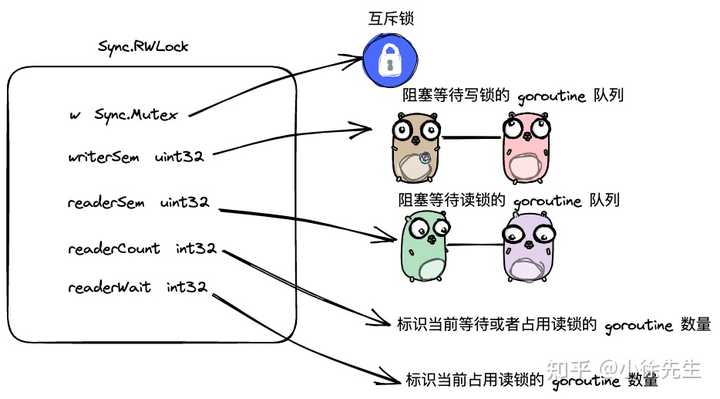
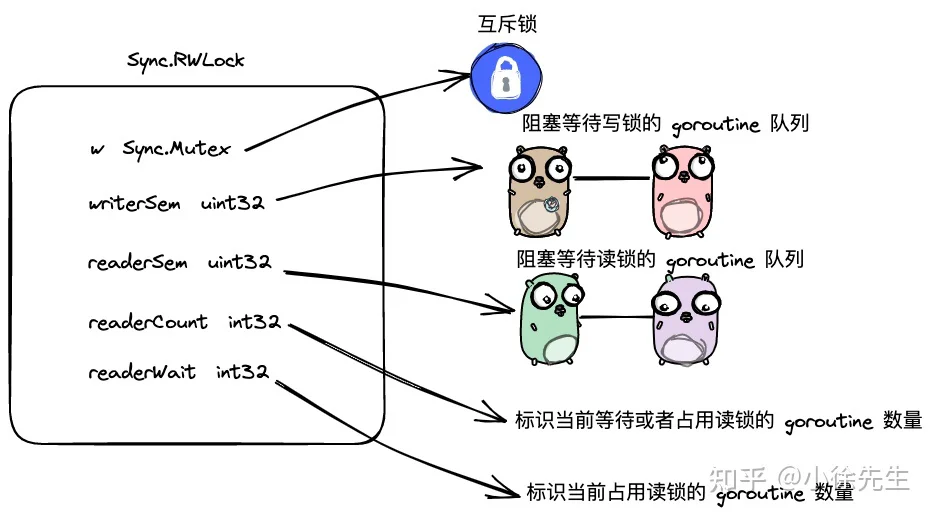
(1)rwmutexMaxReaders:共享读锁的 goroutine 数量上限,值为 2^29;
(2)w:RWMutex 内置的一把普通互斥锁 sync.Mutex;
(3)writerSem:关联写锁阻塞队列的信号量;
(4)readerSem:关联读锁阻塞队列的信号量;
(5)readerCount:正常情况下等于介入读锁流程的 goroutine 数量;当 goroutine 接入写锁流程时,该值为实际介入读锁流程的 goroutine 数量减 rwmutexMaxReaders.
(6)readerWait:记录在当前 goroutine 获取写锁前,还需要等待多少个 goroutine 释放读锁.
2.3 读锁流程
2.3.1 RLock
(1)基于原子操作,将 RWMutex 的 readCount 变量加一,表示占用或等待读锁的 goroutine 数加一;
(2)倘若 RWMutex.readCount 的新值仍小于 0,说明有 goroutine 未释放写锁,因此将当前 goroutine 添加到读锁的阻塞队列中并阻塞挂起.
2.3.2 RUnlock
2.3.2.1 RUnlock 方法主干
(1)基于原子操作,将 RWMutex 的 readCount 变量加一,表示占用或等待读锁的 goroutine 数减一;
(2)倘若 RWMutex.readCount 的新值小于 0,说明有 goroutine 在等待获取写锁,则走入 RWMutex.rUnlockSlow 的流程中.
2.3.2.2 rUnlockSlow
(1)对 RWMutex.readerCount 进行校验,倘若发现当前协程此前未抢占过读锁,或者介入读锁流程的 goroutine 数量达到上限,则抛出 fatal;
倘若 r+1 == -rwmutexMaxReaders,说明此时有 goroutine 介入写锁流程,但当前此前未加过读锁,具体原因见 2.3 小节;倘若 r+1==0,则要么此前未加过读锁,要么介入读锁流程的 goroutine 数量达到上限,具体原因见 2.3 小节.
(2)基于原子操作,对 RWMutex.readerWait 进行减一操作,倘若其新值为 0,说明当前 goroutine 是最后一个介入读锁流程的协程,因此需要唤醒一个等待写锁的阻塞队列的 goroutine.(综合 RWMutex.readerCount 为负值,可以确定存在等待写锁的 goroutine,具体原因见 2.3 小节.)
2.4 写锁流程
2.4.1 Lock
(1)对 RWMutex 内置的互斥锁进行加锁操作;
(2)基于原子操作,对 RWMutex.readerCount 进行减少 -rwmutexMaxReaders 的操作;
(3)倘若此时存在未释放读锁的 gouroutine,则基于原子操作在 RWMutex.readerWait 的基础上加上介入读锁流程的 goroutine 数量,并将当前 goroutine 添加到写锁的阻塞队列中挂起.
2.4.2 Unlock
(1)基于原子操作,将 RWMutex.readerCount 的值加上 rwmutexMaxReaders;
(2)倘若发现 RWMutex.readerCount 的新值大于 rwmutexMaxReaders,则说明要么当前 RWMutex 未上过写锁,要么介入读锁流程的 goroutine 数量已经超限,因此直接抛出 fatal;
(3)因此唤醒读锁阻塞队列中的所有 goroutine;(可见,竞争读锁的 goroutine 更具备优势)
(4)解开 RWMutex 内置的互斥锁.
文末小广告:
欢迎老板们关注我的个人公众号:小徐先生的编程世界
我会不定期更新个人纯原创的编程技术博客,技术栈以 go 语言为主,让我们一起点亮更多的编程技能树吧!