
前言
asongGochannelGosyncchannelGolangGo语言互斥锁设计实现
mutex介绍
syncmutexLock()Unlock()Go1.18TryLock()Lock()LockgoroutinepanicUnlock()UnLockpanictryLock()TryLockmutextype Mutex struct {
state int32
sema uint32
}
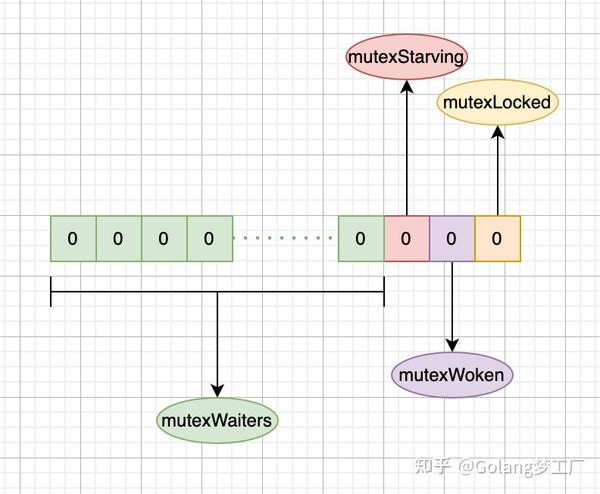
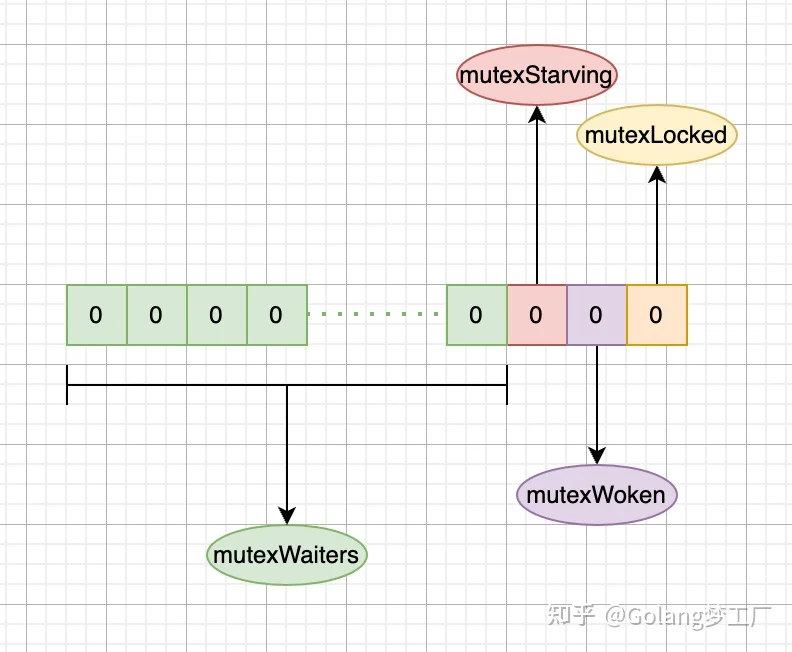
statesemagoroutinestatemutexedmutexWokenmutexStarvinggoroutineconst (
mutexLocked = 1 << iota // 表示互斥锁的锁定状态
mutexWoken // 表示从正常模式被从唤醒
mutexStarving // 当前的互斥锁进入饥饿状态
mutexWaiterShift = iota // 当前互斥锁上等待者的数量
)
mutexgouroutinegoroutinegoroutineGo1.9goroutine1msgoroutinemutexmutexLock加锁
Lockfunc (m *Mutex) Lock() {
// 判断当前锁的状态,如果锁是完全空闲的,即m.state为0,则对其加锁,将m.state的值赋为1
if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) {
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
return
}
// Slow path (outlined so that the fast path can be inlined)
m.lockSlow()
}
上面的代码主要两部分逻辑:
CASstategoroutinelockSlowgoroutinelockSlowlockSlowforCAS初始化状态
locakSlowfunc (m *Mutex) lockSlow() {
var waitStartTime int64
starving := false
awoke := false
iter := 0
old := m.state
........
}
waitStartTimewaiterstarvingawokegoroutineiterold自旋
自旋的判断条件非常苛刻:
for {
// 判断是否允许进入自旋 两个条件,条件1是当前锁不能处于饥饿状态
// 条件2是在runtime_canSpin内实现,其逻辑是在多核CPU运行,自旋的次数小于4
if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) {
// !awoke 判断当前goroutine不是在唤醒状态
// old&mutexWoken == 0 表示没有其他正在唤醒的goroutine
// old>>mutexWaiterShift != 0 表示等待队列中有正在等待的goroutine
// atomic.CompareAndSwapInt32(&m.state, old, old|mutexWoken) 尝试将当前锁的低2位的Woken状态位设置为1,表示已被唤醒, 这是为了通知在解锁Unlock()中不要再唤醒其他的waiter了
if !awoke && old&mutexWoken == 0 && old>>mutexWaiterShift != 0 &&
atomic.CompareAndSwapInt32(&m.state, old, old|mutexWoken) {
// 设置当前goroutine唤醒成功
awoke = true
}
// 进行自旋
runtime_doSpin()
// 自旋次数
iter++
// 记录当前锁的状态
old = m.state
continue
}
}
goroutinemutexold&(mutexLocked|mutexStarving) == mutexLockedmutexLockedmutexStarvingmutexLocked|mutexStarving&runtime_canSpin()// / go/go1.18/src/runtime/proc.go
const active_spin = 4
func sync_runtime_canSpin(i int) bool {
if i >= active_spin || ncpu <= 1 || gomaxprocs <= int32(sched.npidle+sched.nmspinning)+1 {
return false
}
if p := getg().m.p.ptr(); !runqempty(p) {
return false
}
return true
}
自旋条件如下:
CPUGOMAXPROCS>1goroutineruntime_doSpinconst active_spin_cnt = 30
func sync_runtime_doSpin() {
procyield(active_spin_cnt)
}
// asm_amd64.s
TEXT runtime·procyield(SB),NOSPLIT,$0-0
MOVL cycles+0(FP), AX
again:
PAUSE
SUBL $1, AX
JNZ again
RET
30PAUSECPUCPU这就是整个自旋操作的逻辑,这个就是为了优化 等待阻塞->唤醒->参与抢占锁这个过程不高效,所以使用自旋进行优化,在期望在这个过程中锁被释放。
抢锁准备期望状态
mutexLockedmutexStarvingmutexWokenmutexWaiterShiftmutexLocked// 基于old状态声明到一个新状态
new := old
// 新状态处于非饥饿的条件下才可以加锁
if old&mutexStarving == 0 {
new |= mutexLocked
}
mutexWaiterShift//如果old已经处于加锁或者饥饿状态,则等待者按照FIFO的顺序排队
if old&(mutexLocked|mutexStarving) != 0 {
new += 1 << mutexWaiterShift
}
mutexStarving// 如果当前锁处于饥饿模式,并且已被加锁,则将低3位的Starving状态位设置为1,表示饥饿
if starving && old&mutexLocked != 0 {
new |= mutexStarving
}
mutexWoken// 当前goroutine的waiter被唤醒,则重置flag
if awoke {
// 唤醒状态不一致,直接抛出异常
if new&mutexWoken == 0 {
throw("sync: inconsistent mutex state")
}
// 新状态清除唤醒标记,因为后面的goroutine只会阻塞或者抢锁成功
// 如果是挂起状态,那就需要等待其他释放锁的goroutine来唤醒。
// 假如其他goroutine在unlock的时候发现Woken的位置不是0,则就不会去唤醒,那该goroutine就无法在被唤醒后加锁
new &^= mutexWoken
}
CASCAS// 这里尝试将锁的状态更新为期望状态
if atomic.CompareAndSwapInt32(&m.state, old, new) {
// 如果原来锁的状态是没有加锁的并且不处于饥饿状态,则表示当前goroutine已经获取到锁了,直接推出即可
if old&(mutexLocked|mutexStarving) == 0 {
break // locked the mutex with CAS
}
// 到这里就表示goroutine还没有获取到锁,waitStartTime是goroutine开始等待的时间,waitStartTime != 0就表示当前goroutine已经等待过了,则需要将其放置在等待队列队头,否则就排到队列队尾
queueLifo := waitStartTime != 0
if waitStartTime == 0 {
waitStartTime = runtime_nanotime()
}
// 阻塞等待
runtime_SemacquireMutex(&m.sema, queueLifo, 1)
// 被信号量唤醒后检查当前goroutine是否应该表示为饥饿
// 1. 当前goroutine已经饥饿
// 2. goroutine已经等待了1ms以上
starving = starving || runtime_nanotime()-waitStartTime > starvationThresholdNs
// 再次获取当前锁的状态
old = m.state
// 如果当前处于饥饿模式,
if old&mutexStarving != 0 {
// 如果当前锁既不是被获取也不是被唤醒状态,或者等待队列为空 这代表锁状态产生了不一致的问题
if old&(mutexLocked|mutexWoken) != 0 || old>>mutexWaiterShift == 0 {
throw("sync: inconsistent mutex state")
}
// 当前goroutine已经获取了锁,等待队列-1
delta := int32(mutexLocked - 1<<mutexWaiterShift
// 当前goroutine非饥饿状态 或者 等待队列只剩下一个waiter,则退出饥饿模式(清除饥饿标识位)
if !starving || old>>mutexWaiterShift == 1 {
delta -= mutexStarving
}
// 更新状态值并中止for循环,拿到锁退出
atomic.AddInt32(&m.state, delta)
break
}
// 设置当前goroutine为唤醒状态,且重置自璇次数
awoke = true
iter = 0
} else {
// 锁被其他goroutine占用了,还原状态继续for循环
old = m.state
}
CASruntime.sync_runtime_SemacquireMutexgoroutineruntime.sync_runtime_SemacquireMutexgoroutinegoroutinegoroutine解锁
UnLockfunc (m *Mutex) Unlock() {
// Fast path: drop lock bit.
new := atomic.AddInt32(&m.state, -mutexLocked)
if new != 0 {
// Outlined slow path to allow inlining the fast path.
// To hide unlockSlow during tracing we skip one extra frame when tracing GoUnblock.
m.unlockSlow(new)
}
}
AddInt320goroutineunlockSlowfunc (m *Mutex) unlockSlow(new int32) {
// 这里表示解锁了一个没有上锁的锁,则直接发生panic
if (new+mutexLocked)&mutexLocked == 0 {
throw("sync: unlock of unlocked mutex")
}
// 正常模式的释放锁逻辑
if new&mutexStarving == 0 {
old := new
for {
// 如果没有等待者则直接返回即可
// 如果锁处于加锁的状态,表示已经有goroutine获取到了锁,可以返回
// 如果锁处于唤醒状态,这表明有等待的goroutine被唤醒了,不用尝试获取其他goroutine了
// 如果锁处于饥饿模式,锁之后会直接给等待队头goroutine
if old>>mutexWaiterShift == 0 || old&(mutexLocked|mutexWoken|mutexStarving) != 0 {
return
}
// 抢占唤醒标志位,这里是想要把锁的状态设置为被唤醒,然后waiter队列-1
new = (old - 1<<mutexWaiterShift) | mutexWoken
if atomic.CompareAndSwapInt32(&m.state, old, new) {
// 抢占成功唤醒一个goroutine
runtime_Semrelease(&m.sema, false, 1)
return
}
// 执行抢占不成功时重新更新一下状态信息,下次for循环继续处理
old = m.state
}
} else {
// 饥饿模式释放锁逻辑,直接唤醒等待队列goroutine
runtime_Semrelease(&m.sema, true, 1)
}
}
goroutinefunc runtime_Semrelease(s *uint32, handoff bool, skipframes int)handoff is true, pass count directly to the first waiter.非阻塞加锁
Go1.18TryLock()func (m *Mutex) TryLock() bool {
// 记录当前状态
old := m.state
// 处于加锁状态/饥饿状态直接获取锁失败
if old&(mutexLocked|mutexStarving) != 0 {
return false
}
// 尝试获取锁,获取失败直接获取失败
if !atomic.CompareAndSwapInt32(&m.state, old, old|mutexLocked) {
return false
}
return true
}
TryLock- 判断当前锁的状态,如果锁处于加锁状态或饥饿状态直接获取锁失败
- 尝试获取锁,获取失败直接获取锁失败
TryLock总结
通读源码后你会发现互斥锁的逻辑真的十分复杂,代码量虽然不多,但是很难以理解,一些细节点还需要大家多看看几遍才能理解其为什么这样做,文末我们再总结一下互斥锁的知识点:
goroutinegoroutineGo1.9goroutine1msMutexgoroutine1msMutexgoroutinegoroutineunlockedslowmutexLockedgoroutineMutexMutexLock本文之后你对互斥锁有什么不理解的吗?欢迎评论区批评指正~;
好啦,本文到这里就结束了,我是asong,我们下期见。
欢迎关注公众号:Golang梦工厂