
1.调度器的由来
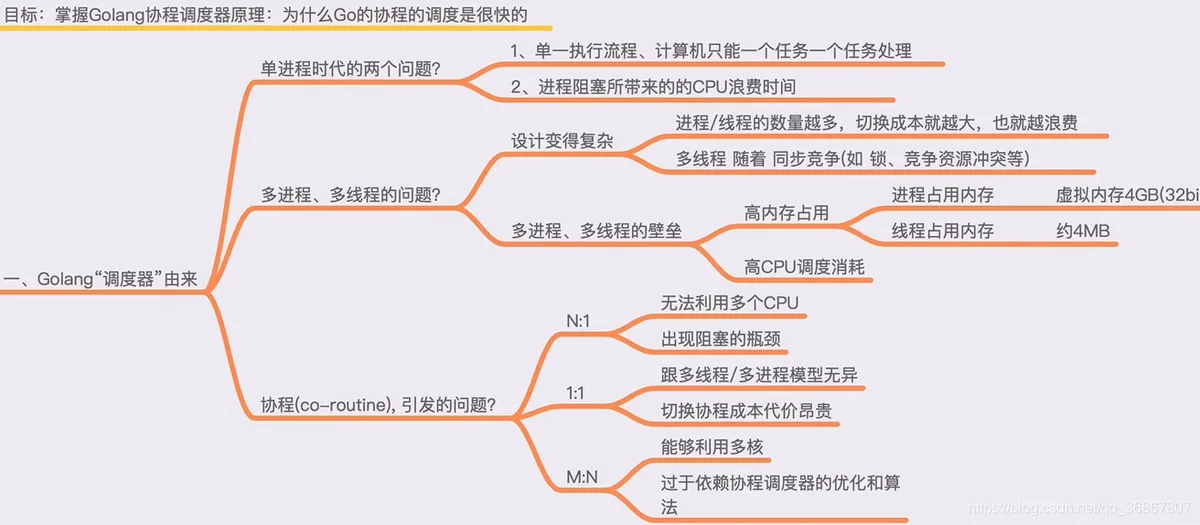
1.早期的单进程操作系统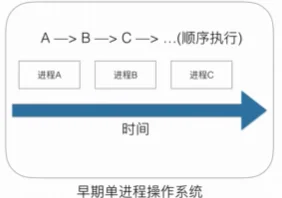
缺点:单一执行流程、计算机只能一个一个业务处理
进程阻塞所带来的CPU浪费时间
2.多进程/多线程操作系统
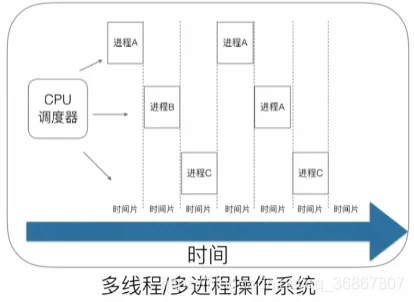
解决了阻塞问题,CPU轮询,进程切换需要保存状态,造成了巨大的时间浪费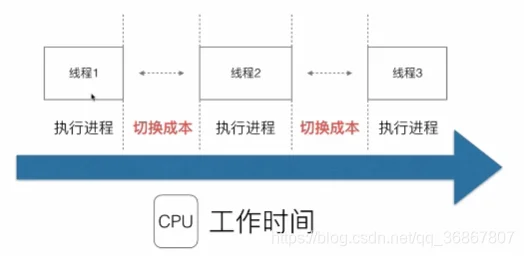
面临的问题是 线程越多,不停的切换轮询CPU,代价越大。所以在语言层面,让多个协程(任务绑定在一个线程内完成,可以减少线程切换)
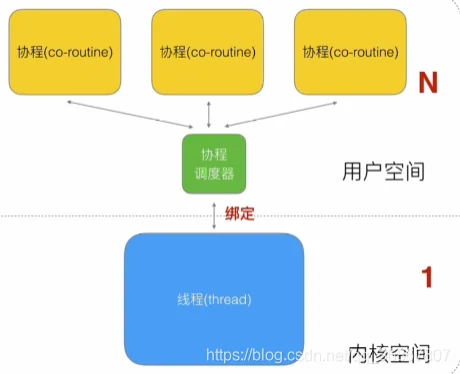
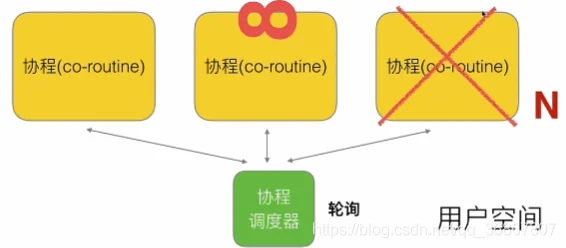
N:1 带来的问题是 如果一个协程阻塞,同一个线程绑定的下一个协程就会持续等待
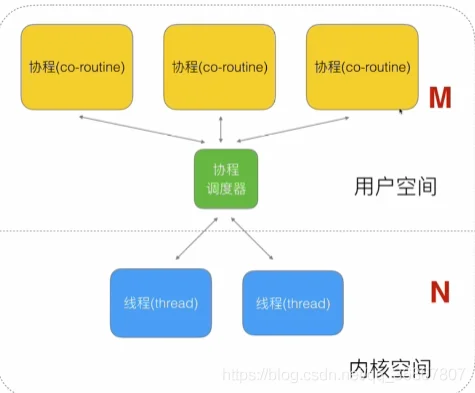
M:N 模型化解了问题,如果一个协程阻塞,可以绑定到下一个线程
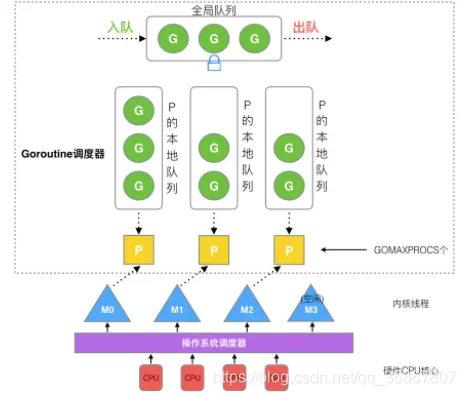
2.GMP模型的设计思想
在调度器中,出列M(thread)和G(goroutine),又引进了P(Processor)。
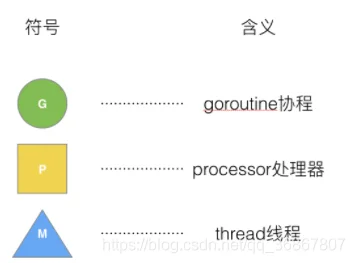
Processor,它包含了运行goroutine的资源,如果线程想运行goroutine,必须先获取P,P中还包含了可运行的G队列。
1.GMP模型
在Go中,线程是运行goroutine的实体,调度器的功能是把可运行的goroutine分配到工作线程上。
GOMAXPROCS2.P和M的数量问题
1、P的数量:
$GOMAXPROCSruntimeGOMAXPROCS()$GOMAXPROCSM与P的数量没有绝对关系,一个M阻塞,P就会去创建或者切换另一个M,所以,即使P的默认数量是1,也有可能会创建很多个M出来。
3.P和M何时会被创建
1、P何时创建:在确定了P的最大数量n后,运行时系统会根据这个数量创建n个P。
2、M何时创建:没有足够的M来关联P并运行其中的可运行的G。比如所有的M此时都阻塞住了,而P中还有很多就绪任务,就会去寻找空闲的M,而没有空闲的,就会去创建新的M。