
Section1 Scheduler原理本文主要分析Golang底层对于协程的调度原理,本文与Golang的memory allocation、garbage collection这两个主题是紧密相关的,本文scheduler作为系列的第一篇文章。
文章大体上的思路是这样的:
section1:主要图示和文字介绍scheduler的原理;
section2:主要模型的角度介绍scheduler原理;
section3:从主要调度流程介绍scheduler原理;
section4:分析scheduler与memory allocation、channel、garbage collection关联部分
基于源码 Go SDK 1.11
1.基础知识
Golang支持语言级别的并发,并发的最小逻辑单位叫做goroutine,goroutine就是Go为了实现并发提供的用户态线程,这种用户态线程是运行在内核态线程(OS线程)之上。当我们创建了大量的goroutine并且同时运行在一个或则多个内核态线程上时(内核线程与goroutine是m:n的对应关系),就需要一个调度器来维护管理这些goroutine,确保所有的goroutine都有相对公平的机会使用CPU。
这里再次强调一次,goroutine与内核OS线程的映射关系是M:N,这样多个goroutine就可以在多个内核线程上面运行。goroutine的切换大部分场景下都没有走OS线程的切换所带来的开销,这样整体运行效率相比OS线程的调度会高很多,但是这样带来的问题就是goroutine调度模型的复杂。
2.调度模型
Golang的调度模型主要有几个主要的实体:G、M、P、schedt。
runtime.GOMAXPROCS (numLogicalProcessors)为了解释清楚这几个实体之间的关系,我们先抽象G、M、P、schedt的关系,主要的workflow如下图所示:
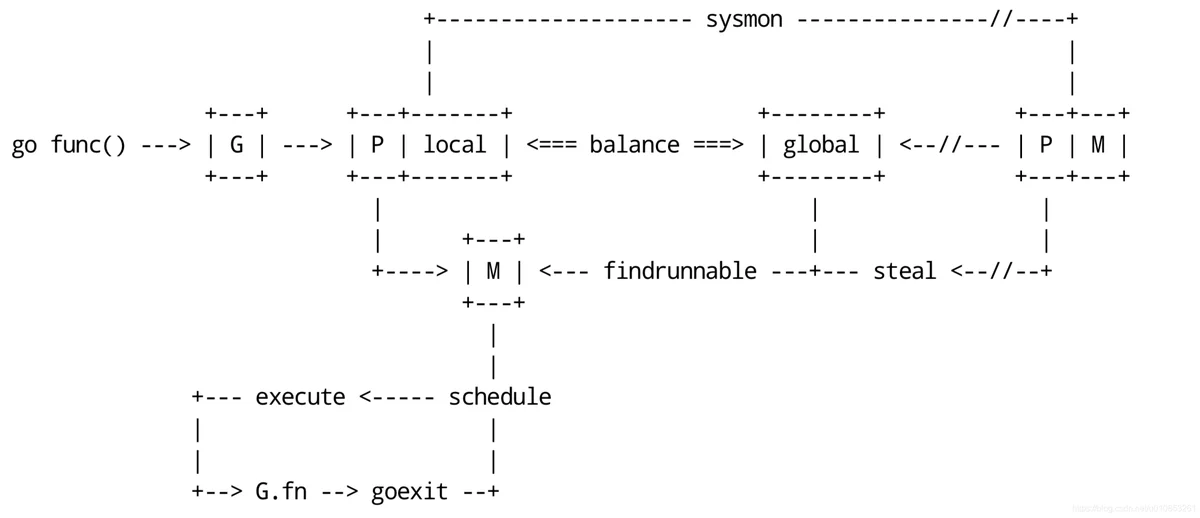
从上图我们可以分析出几个结论:
local queueschedtGo运行时会在下面的goroutine被阻塞的情况下运行另外一个goroutine:
- syscall、
- network input、
- channel operations、
- primitives in the sync package。
3.调度核心问题
前面已经大致介绍了scheduler的一些核心调度原理,介绍的都是比较抽象的内容。听下来还有几个疑问需要分析,主要通过后面的源码来进行细致分析。
Question1:如果一个goroutine一直占有CPU又不会有阻塞或则主动让出CPU的调度,scheduler怎么做抢占式调度让出CPU?
Answer1:有一个sysmon线程做抢占式调度,当一个goroutine占用CPU超过10ms之后,调度器会根据实际情况提供不保证的协程切换机制,具体细节见后面源码分析。
Question2:我们知道P的上限是系统启动时候设定的并且一般不会更改,那么内核线程M上限是多少?遇到需要新的M时候是选取IDEL的M还是创建新的M,整体策略是怎样的?
Answer2:在golang系统启动时候会设置内核线程上限是10000,这里先解释一下,M的数量与P的数量和G的数量没有直接关系,实际情况要看调度器的执行情况。
至于具体的策略见后面的源码分析。
Question3:P、M、G的状态机运转,主要是协程对象G。
Answer3:状态机见后面的源码分析
Question4:每一个协程goroutine的栈空间是保存在哪里的?P、M、G分别维护的与内存有关的数据有哪些?
Answer4:golang scheduler use thrid-level cache,each goroutine stack space is applied in heap。
Question5:当syscall、网络IO、channel时,如果这些阻塞返回了,对应的G会被保存在哪个地方?global Queue或则是local queue? 为什么?系统初始化时候的G会被保存在哪里?为什么?
Answer5:唤醒的M首先会尝试获取一个空闲P,然后将G放到P的local queue,如果获取失败,就放进 global queue,然后M自己放进the M idle 列表。
Notice:scheduler的源码主要在两个文件:
- runtime/runtime2.go 主要是实体G、M、P、schedt的数据模型
- runtime/proc.go 主要是调度实现的逻辑部分。
这一部分主要结合源码进行分析,主要分为两个部分,一部分介绍主要模型G、M、P、schedt的职责、维护的数据域以及它们的联系。
2.1 实体M
实体M在模型上等同于系统内核OS线程,M运行的go代码类型有两种:
- goroutine代码, M运行go代码需要一个实体P进行局部调度;
- 原生代码, 例如阻塞的syscall, M运行原生代码不需要P
M会从runqueue(local or global)中抽取G并运行,如果G运行完毕或则G进入了睡眠态,就会从runqueue中取出下一个runnable状态的G运行, 循环调度。
G有时会执行一些阻塞调用(syscall),这时M会释放持有的P并进入阻塞态,其他的M会取得这个idel状态的P并继续运行队列中的G。Golang需要保证有足够的M可以运行G, 不让CPU闲着, 也需要保证M的数量不能过多。通常创建一个M的原因是由于没有足够的M来关联P并运行其中可运行的G。而且运行时系统执行系统监控的时候,或者GC的时候也会创建M。
M结构体定义在runtime2.go如下:
type m struct {
/*
1. 所有调用栈的Goroutine,这是一个比较特殊的Goroutine。
2. 普通的Goroutine栈是在Heap分配的可增长的stack,而g0的stack是M对应的线程栈。
3. 所有与调度相关的代码,都会先切换到g0的栈再执行。
*/
g0 *g // goroutine with scheduling stack
morebuf gobuf // gobuf arg to morestack
divmod uint32 // div/mod denominator for arm - known to liblink
// Fields not known to debuggers.
procid uint64 // for debuggers, but offset not hard-coded
gsignal *g // signal-handling g
goSigStack gsignalStack // Go-allocated signal handling stack
sigmask sigset // storage for saved signal mask
tls [6]uintptr // thread-local storage (for x86 extern register)
// 表示M的起始函数。其实就是我们 go 语句携带的那个函数。
mstartfn func()
// M中当前运行的goroutine
curg *g // current running goroutine
caughtsig guintptr // goroutine running during fatal signal
// 与M绑定的P,如果为nil表示空闲
p puintptr // attached p for executing go code (nil if not executing go code)
// 用于暂存于当前M有潜在关联的P。 (预联)当M重新启动时,即用预联的这个P做关联啦
nextp puintptr
id int64
mallocing int32
throwing int32
// 当前m是否关闭抢占式调度
preemptoff string // if != "", keep curg running on this m
/** */
locks int32
dying int32
profilehz int32
// 不为0表示此m在做帮忙gc。helpgc等于n只是一个编号
helpgc int32
// 自旋状态,表示当前M是否正在自旋寻找G。在寻找过程中M处于自旋状态。
spinning bool // m is out of work and is actively looking for work
blocked bool // m is blocked on a note
inwb bool // m is executing a write barrier
newSigstack bool // minit on C thread called sigaltstack
printlock int8
incgo bool // m is executing a cgo call
freeWait uint32 // if == 0, safe to free g0 and delete m (atomic)
fastrand [2]uint32
needextram bool
traceback uint8
ncgocall uint64 // number of cgo calls in total
ncgo int32 // number of cgo calls currently in progress
cgoCallersUse uint32 // if non-zero, cgoCallers in use temporarily
cgoCallers *cgoCallers // cgo traceback if crashing in cgo call
park note
//这个域用于链接allm
alllink *m // on allm
schedlink muintptr
mcache *mcache
// 表示与当前M锁定的那个G。运行时系统会把 一个M 和一个G锁定,一旦锁定就只能双方相互作用,不接受第三者。
lockedg guintptr
createstack [32]uintptr // stack that created this thread.
lockedExt uint32 // tracking for external LockOSThread
lockedInt uint32 // tracking for internal lockOSThread
nextwaitm muintptr // next m waiting for lock
waitunlockf unsafe.Pointer // todo go func(*g, unsafe.pointer) bool
waitlock unsafe.Pointer
waittraceev byte
waittraceskip int
startingtrace bool
syscalltick uint32
thread uintptr // thread handle
freelink *m // on sched.freem
// these are here because they are too large to be on the stack
// of low-level NOSPLIT functions.
libcall libcall
libcallpc uintptr // for cpu profiler
libcallsp uintptr
libcallg guintptr
syscall libcall // stores syscall parameters on windows
vdsoSP uintptr // SP for traceback while in VDSO call (0 if not in call)
vdsoPC uintptr // PC for traceback while in VDSO call
mOS
}
上面字段很多,核心的主要是以下几个字段:
g0 *g // goroutine with scheduling stack,也是运行局部调度器的g
mstartfn func()
curg *g // current running goroutine
p puintptr // attached p for executing go code (nil if not executing go code)
nextp puintptr
helpgc int32
spinning bool // m is out of work and is actively looking for work
alllink *m // on allm
lockedg guintptr
这些字段主要功能如下:
- g0: Golang runtime系统在线程创建的时候创建的,g0的栈使用的是内核线程的栈,主要用于局部调度器执行调度逻辑时使用的栈,也就是执行调度逻辑时的线程栈。
- mstartfn:表示M的起始函数。其实就是我们 go 关键字后面携带的那个函数。
- curg:存放当前正在运行的G的指针。
- p:指向当前与M关联的那个P。
- nextp:用于暂存于当前M有潜在关联的P。 (预联)当M重新启动时,即用预联的这个P做关联啦
- spinning:自旋状态标志位,表示当前M是否正在寻找G。
- alllink:连接到所有的m链表的一个指针。
- lockedg:表示与当前M锁定的那个G。运行时系统会把 一个M 和一个G锁定,一旦锁定就只能双方相互作用,不接受第三者。
M的状态机比较简单,因为M是golang对内核OS线程的更上一层抽象,所以M也没有专门字段来维护状态,简单来说有一下几种状态:
- 自旋中(spinning): M正在从运行队列获取G, 这时候M会拥有一个P;
- 执行go代码中: M正在执行go代码, 这时候M会拥有一个P;
- 执行原生代码中: M正在执行原生代码或者阻塞的syscall, 这时M并不拥有P;
- 休眠中: M发现无待运行的G时会进入休眠,并添加到空闲M链表中, 这时M并不拥有P。
上面的几种状态中,spinning这个状态非常重要,是否需要唤醒或者创建新的M取决于当前自旋中的M的数量。
M在被创建之初会被加入到全局的M列表 【runtime.allm】。 接着,M的起始函数(mstartfn)和准备关联的P都会被设置。最后,runtime会为M专门创建一个新的内核线程并与之关联。这时候这个新的M就为执行G做好了准备。其中起始函数(mstartfn)仅当runtime要用此M执行系统监控或者垃圾回收等任务的时候才会被设置。【runtime.allm】的作用是runtime在需要的时候会通过它获取到所有的M的信息,同时防止M被gc。
在新的M被创建后会做一些初始化工作。其中包括了对自身所持的栈空间以及信号的初始化。在上述初始化完成后 mstartfn 函数就会被执行 (如果存在的话)。【注意】:如果mstartfn 代表的是系统监控任务的话,那么该M会一直在执行mstartfn 而不会有后续的流程。否则 mstartfn 执行完后,当前M将会与那个准备与之关联的P完成关联。至此,一个并发执行环境才真正完成。之后就是M开始寻找可运行的G并运行之。
runtime管辖的M会在GC任务执行的时候被停止,这时候系统会对M的属性做某些必要的重置并把M放置入全局调度器的空闲M列表。【很重要】因为调度器在需要一个未被使用的M时,运行时系统会先去这个空闲列表获取M。(只有都没有的时候才会创建M)
M本身是无状态的。M是否是空闲态仅根据它是否存在于调度器的空闲M列表 【runtime.sched.midle】 中来判定(注意:空闲列表不是那个全局列表)。
单个Go程序所使用的M的最大数量是可以被设置的。在我们使用命令运行Go程序时候,有一个引导程序先会被启动的。在这个引导程序中会为Go程序的运行建立必要的环境。引导程序对M的数量进行初始化设置,默认最大值是10000【一个Go程序最多可以使用10000个M,即:理想状态下,可以同时有1W个内核线程被同时运行】。可以使用 runtime/debug.SetMaxThreads() 函数设置。
2.2 实体P(processor)
P是一个抽象的概念,并不代表一个具体的实体,抽象地表示M运行G所需要的资源。P并不代表CPU核心数,而是表示执行go代码的并发度。有一点需要注意的是,执行原生代码的时候并不受P数量的限制。
同一时间只有一个线程(M)可以拥有P, 局部调度器P维护的数据都是锁自由(lock free)的, 读写这些数据的效率会非常的高。
P是使G能够在M中运行的关键。Go的runtime适当地让P与不同的M建立或者断开联系,以使得P中的那些可运行的G能够在需要的时候及时获得运行时机。
P结构体定义在runtime2.go如下:
type p struct {
lock mutex
id int32
// 当前p的状态
status uint32 // one of pidle/prunning/...
// 链接
link puintptr
schedtick uint32 // incremented on every scheduler call
syscalltick uint32 // incremented on every system call
sysmontick sysmontick // last tick observed by sysmon
// p反向链接到关联的m(空闲时为nil)
m muintptr // back-link to associated m (nil if idle)
mcache *mcache
racectx uintptr
deferpool [5][]*_defer // pool of available defer structs of different sizes (see panic.go)
deferpoolbuf [5][32]*_defer
// Cache of goroutine ids, amortizes accesses to runtime·sched.goidgen.
goidcache uint64
goidcacheend uint64
// Queue of runnable goroutines. Accessed without lock.
runqhead uint32
runqtail uint32
runq [256]guintptr
// runnext, if non-nil, is a runnable G that was ready'd by
// the current G and should be run next instead of what's in
// runq if there's time remaining in the running G's time
// slice. It will inherit the time left in the current time
// slice. If a set of goroutines is locked in a
// communicate-and-wait pattern, this schedules that set as a
// unit and eliminates the (potentially large) scheduling
// latency that otherwise arises from adding the ready'd
// goroutines to the end of the run queue.
runnext guintptr
// Available G's (status == Gdead)
gfree *g
gfreecnt int32
sudogcache []*sudog
sudogbuf [128]*sudog
tracebuf traceBufPtr
// traceSweep indicates the sweep events should be traced.
// This is used to defer the sweep start event until a span
// has actually been swept.
traceSweep bool
// traceSwept and traceReclaimed track the number of bytes
// swept and reclaimed by sweeping in the current sweep loop.
traceSwept, traceReclaimed uintptr
palloc persistentAlloc // per-P to avoid mutex
// Per-P GC state
gcAssistTime int64 // Nanoseconds in assistAlloc
gcFractionalMarkTime int64 // Nanoseconds in fractional mark worker
gcBgMarkWorker guintptr
gcMarkWorkerMode gcMarkWorkerMode
// gcMarkWorkerStartTime is the nanotime() at which this mark
// worker started.
gcMarkWorkerStartTime int64
// gcw is this P's GC work buffer cache. The work buffer is
// filled by write barriers, drained by mutator assists, and
// disposed on certain GC state transitions.
gcw gcWork
// wbBuf is this P's GC write barrier buffer.
//
// TODO: Consider caching this in the running G.
wbBuf wbBuf
runSafePointFn uint32 // if 1, run sched.safePointFn at next safe point
pad [sys.CacheLineSize]byte
}
这些字段里面比较核心的字段如下:
lock mutex
status uint32 // one of pidle/prunning/...
link puintptr
m muintptr // back-link to associated m (nil if idle)
// local runnable queue. Accessed without lock. implement through array
runqhead uint32
runqtail uint32
runq [256]guintptr
runnext guintptr
// Available G's (status == Gdead)
gfree *g
通过runtime.GOMAXPROCS函数我们可以改变单个Go程序可以拥有P的最大数量,如果不做设置会有一个默认值。
每一个P都必须关联一个M才能使其中的G得以运行。
【注意】:runtime会将M与关联的P分离开来。但是如果该P的runqueue中还有未运行的G,那么runtime就会找到一个空的M(在调度器的空闲队列中的M) 或者创建一个空的M,并与该P关联起来(为了运行G而做准备)。
runtime.GOMAXPROCS只能够设置P的数量,并不会影响到M(内核线程)数量,所以runtime.GOMAXPROCS不是控制线程数,只能影响局部调度器P的数量。
在runtime初始化时会确认P的最大数量,之后会根据这个最大值初始化全局P列表【runtime.allp】。类似全局M列表,【runtime.allp】包含了runtime创建的所有P。随后,runtime会把调度器的可运行G队列【runtime.schedt.runq】中的所有G均匀的放入全局的P列表中的各个P的可执行G队列 local queue中。到这里为止,runtime需要用到的所有P都准备就绪了。
类似M的空闲列表,调度器也存在一个空闲P的列表【runtime.shcedt.pidle】,当一个P不再与任何M关联的时候,runtime会把该P放入这个列表,而一个空闲的P关联了某个M之后会被从【runtime.shcedt.pidle】中取出来。【注意:一个P加入了空闲列表,其G的可运行local queue也不一定为空】。
和M不同,P是有状态机的(五种):
- Pidel:当前P未和任何M关联
- Prunning:当前P已经和某个M关联,M在执行某个G
- Psyscall:当前P中的被运行的那个G正在进行系统调用
- Pgcstop:runtime正在进行GC(runtime会在gc时试图把全局P列表中的P都处于此种状态)
- Pdead:当前P已经不再被使用(在调用runtime.GOMAXPROCS减少P的数量时,多余的P就处于此状态)
在对P初始化的时候就是Pgcstop的状态,但是这个状态保持时间很短,在初始化并填充P中的G队列之后,runtime会将其状态置为Pidle并放入调度器的空闲P列表【runtime.schedt.pidle】中,其中的P会由调度器根据实际情况进行取用。具体的状态机流转图如下图所示:
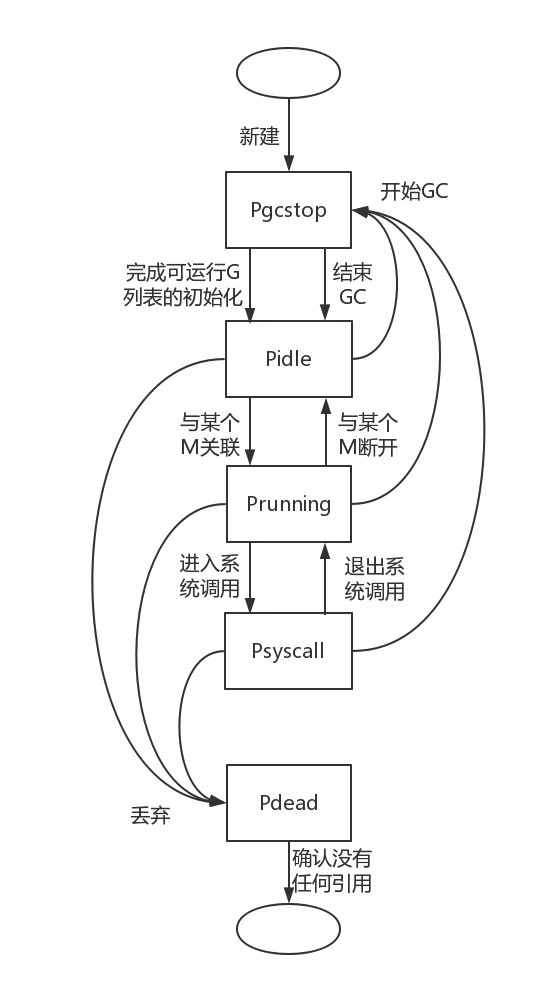
从上图我们可以看到,除了Pdead状态以外的其余状态,在runtime进行GC的时候,P都会被指定成Pgcstop。在GC结束后状态不会回复到GC前的状态,而是都统一直接转到了Pidle 【这意味着,他们都需要被重新调度】。
【注意】除了Pgcstop 状态的P,其他状态的P都会在调用runtime.GOMAXPROCS 函数减少P数目时,被认为是多余的P而状态转为Pdead,这时候其带的可运行G的队列中的G都会被转移到调度器的可运行G队列中,它的自由G队列 【gfree】也是一样被移到调度器的自由列表【runtime.sched.gfree】中。
【注意】每个P中都有一个可运行G队列及自由G队列。自由G队列包含了很多已经完成的G,随着被运行完成的G的积攒到一定程度后,runtime会把其中的部分G转移到全局调度器的自由G队列 【runtime.sched.gfree】中。
【注意】当我们每次用 go关键字启用一个G的时候,首先都是尽可能复用已经执行完的G。具体过程如下:运行时系统都会先从P的自由G队列获取一个G来封装我们提供的函数 (go 关键字后面的函数) ,如果发现P中的自由G过少时,会从调度器的自由G队列中移一些G过来,只有连调度器的自由G列表都弹尽粮绝的时候,才会去创建新的G。
2.3 实体G(goroutine)
goroutine可以理解成被调度器管理的轻量级线程,goroutine使用go关键字创建。
goroutine的新建, 休眠, 恢复, 停止都受到go的runtime管理。
goroutine执行异步操作时会进入休眠状态, 待操作完成后再恢复, 无需占用系统线程。
goroutine新建或恢复时会添加到运行队列, 等待M取出并运行。
g和gobuf的结构定义和在runtime2.go如下:
type g struct {
// Stack parameters.
// stack describes the actual stack memory: [stack.lo, stack.hi).
// stackguard0 is the stack pointer compared in the Go stack growth prologue.
// It is stack.lo+StackGuard normally, but can be StackPreempt to trigger a preemption.
// stackguard1 is the stack pointer compared in the C stack growth prologue.
// It is stack.lo+StackGuard on g0 and gsignal stacks.
// It is ~0 on other goroutine stacks, to trigger a call to morestackc (and crash).
stack stack // offset known to runtime/cgo
stackguard0 uintptr // offset known to liblink
stackguard1 uintptr // offset known to liblink
_panic *_panic // innermost panic - offset known to liblink
_defer *_defer // innermost defer
/**
* 有一个指针指向执行它的m,也即g隶属于m;
*/
m *m // current m; offset known to arm liblink
// 进程切换时,利用sched域来保存上下文
sched gobuf
syscallsp uintptr // if status==Gsyscall, syscallsp = sched.sp to use during gc
syscallpc uintptr // if status==Gsyscall, syscallpc = sched.pc to use during gc
stktopsp uintptr // expected sp at top of stack, to check in traceback
param unsafe.Pointer // passed parameter on wakeup
// 状态Gidle,Grunnable,Grunning,Gsyscall,Gwaiting,Gdead
atomicstatus uint32
stackLock uint32 // sigprof/scang lock; TODO: fold in to atomicstatus
goid int64
//????
schedlink guintptr
waitsince int64 // approx time when the g become blocked
waitreason waitReason // if status==Gwaiting
// 抢占标志
preempt bool // preemption signal, duplicates stackguard0 = stackpreempt
paniconfault bool // panic (instead of crash) on unexpected fault address
preemptscan bool // preempted g does scan for gc
gcscandone bool // g has scanned stack; protected by _Gscan bit in status
gcscanvalid bool // false at start of gc cycle, true if G has not run since last scan; TODO: remove?
throwsplit bool // must not split stack
raceignore int8 // ignore race detection events
sysblocktraced bool // StartTrace has emitted EvGoInSyscall about this goroutine
sysexitticks int64 // cputicks when syscall has returned (for tracing)
traceseq uint64 // trace event sequencer
tracelastp puintptr // last P emitted an event for this goroutine
// G被锁定只能在这个m上运行
lockedm muintptr
sig uint32
writebuf []byte
sigcode0 uintptr
sigcode1 uintptr
sigpc uintptr
// 创建这个goroutine的go表达式的pc
gopc uintptr // pc of go statement that created this goroutine
ancestors *[]ancestorInfo // ancestor information goroutine(s) that created this goroutine (only used if debug.tracebackancestors)
startpc uintptr // pc of goroutine function
racectx uintptr
waiting *sudog // sudog structures this g is waiting on (that have a valid elem ptr); in lock order
cgoCtxt []uintptr // cgo traceback context
labels unsafe.Pointer // profiler labels
timer *timer // cached timer for time.Sleep
selectDone uint32 // are we participating in a select and did someone win the race?
// Per-G GC state
// gcAssistBytes is this G's GC assist credit in terms of
// bytes allocated. If this is positive, then the G has credit
// to allocate gcAssistBytes bytes without assisting. If this
// is negative, then the G must correct this by performing
// scan work. We track this in bytes to make it fast to update
// and check for debt in the malloc hot path. The assist ratio
// determines how this corresponds to scan work debt.
gcAssistBytes int64
}
//用于保存G切换时上下文的缓存结构体
type gobuf struct {
// The offsets of sp, pc, and g are known to (hard-coded in) libmach.
//
// ctxt is unusual with respect to GC: it may be a
// heap-allocated funcval, so GC needs to track it, but it
// needs to be set and cleared from assembly, where it's
// difficult to have write barriers. However, ctxt is really a
// saved, live register, and we only ever exchange it between
// the real register and the gobuf. Hence, we treat it as a
// root during stack scanning, which means assembly that saves
// and restores it doesn't need write barriers. It's still
// typed as a pointer so that any other writes from Go get
// write barriers.
sp uintptr //当前的栈指针
pc uintptr //当前的计数器
g guintptr //g自身引用
ctxt unsafe.Pointer
ret sys.Uintreg
lr uintptr
bp uintptr // for GOEXPERIMENT=framepointer
}
Go语言的编译器会把我们编写的goroutine编译为runtime的函数调用,并把go语句中的函数以及其参数传递给runtime的函数中。
runtime在接到这样一个调用后,会先检查一下go函数及其参数的合法性,紧接着会试图从局部调度器P的自由G队列中(或者全局调度器的自由G队列)中获取一个可用的自由G (P中有讲述了),如果没有则新创建一个G。类似M和P,G在运行时系统中也有全局的G列表【runtime.allg】,那些新建的G会先放到这个全局的G列表中,其列表的作用也是集中放置了当前运行时系统中给所有的G的指针。在用自由G封装go的函数时,运行时系统都会对这个G重新做一次初始化。
初始化:包含了被关联的go关键字后的函数及当前G的状态机G的ID等等。在G被初始化完成后就会被放置到当前本地的P的可运行队列中。只要时机成熟,调度器会立即尽心这个G的调度运行。
G的状态机会比较复杂一点,大致上和内核线程的状态机有一点类似,但是状态机流转有一些区别。G的各种状态如下:
- Gidle:G被创建但还未完全被初始化。
- Grunnable:当前G为可运行的,正在等待被运行。
- Grunning:当前G正在被运行。
- Gsyscall:当前G正在被系统调用
- Gwaiting:当前G正在因某个原因而等待
- Gdead:当前G完成了运行
初始化完的G是处于Grunnable的状态,一个G真正在M中运行时是处于Grunning的状态,G的状态机流转图如下图所示:
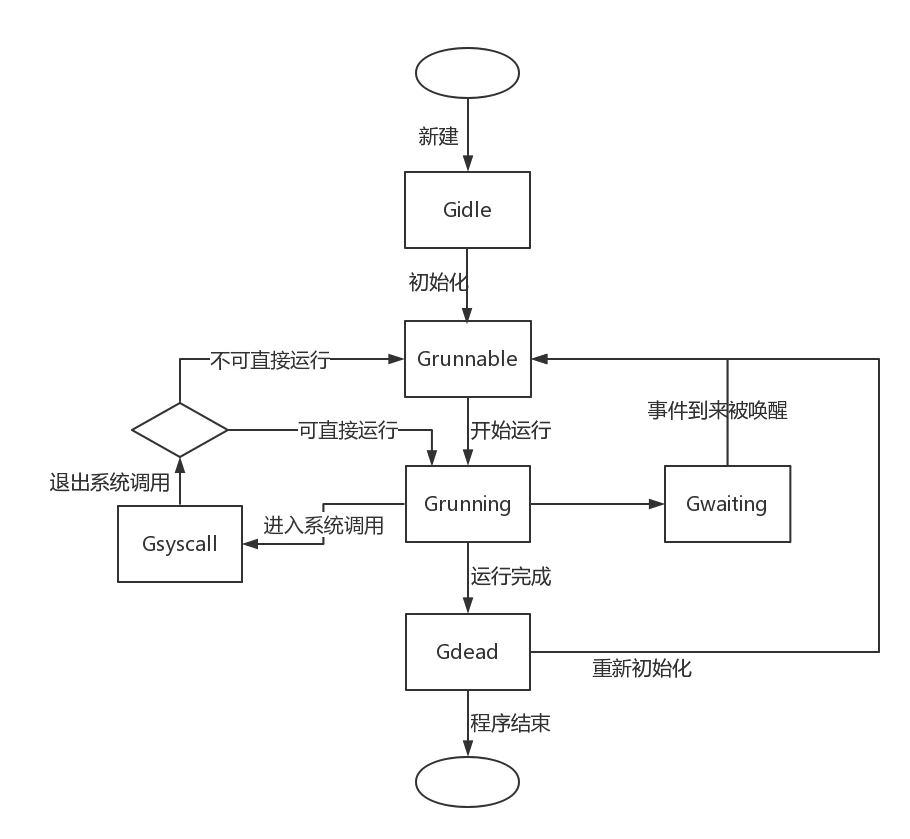
上图有一步是等待的事件到来,那么G在运行过程中,是否等待某个事件以及等待什么样的事件?完全由起封装的go关键字后的函数决定。(如:等待chan中的值、涉及网络I/O、time.Timer、time.Sleep等等事件)
G退出系统调用的过程非常复杂:runtime先会尝试获取空闲局部调度器P并直接运行当前G,如果没有就会把当前G转成Grunnable状态并放置入全局调度器的global queue。
最后,已经是Gdead状态的G是可以被重新初始化并使用的(从自由G队列取出来重新初始化使用)。而对比进入Pdead状态的P等待的命运只有被销毁。处于Gdead的G会被放置到本地P或者调度器的自由G列表中。
至此,G、M、P的初步描述已经完毕,下面我们来看一看一些核心的队列:
| 中文名 | 源码名称 | 作用域 | 简要说明 |
|---|---|---|---|
| 全局M列表 | runtime.allm | 运行时系统 | 存放所有M |
| 全局P列表 | runtime.allp | 运行时系统 | 存放所有P |
| 全局G列表 | runtime.allg | 运行时系统 | 存放所有G |
| 调度器中的空闲M列表 | runtime.schedt.midle | 调度器 | 存放空闲M,链表结构 |
| 调度器中的空闲P列表 | runtime.schedt.pidle | 调度器 | 存放空闲P,链表结构 |
| 调度器中的可运行G队列 | runtime.schedt.runq | 调度器 | 存放可运行G,链表结构 |
| 调度器中的自由G列表 | runtime.schedt.gfree | 调度器 | 存放自由G, 链表结构 |
| P中的可运行G队列 | runq | 本地P | 存放当前P中的可运行G,环形队列,数组实现 |
| P中的自由G列表 | gfree | 本地P | 存放当前P中的自由G,链表结构 |
三个全局的列表主要为了统计runtime的所有G、M、P。我们主要关心剩下的这些容器,尤其是和G相关的四个。
在runtime创建的G都会被保存在全局的G列表中,值得注意的是:
- 从Gsyscall转出来的G,如果不能马上获取空闲的P执行,就会被放置到全局调度器的可运行队列中(global queue)。
- 被runtime初始化的G会被放置到本地P的可运行队列中(local queue)
- 从Gwaiting转出来的G,除了因网络IO陷入等待的G之外,都会被防止到本地P可运行的G队列中。
- 转成Gdead状态的G会先被放置在本地P的自由G列表。
- 调度器中的与G、M、P相关的列表其实只是起了一个暂存的作用。
一句话概括三者关系:
- G需要绑定在M上才能运行
- M需要绑定P才能运行
这三者之间的实体关系是:

内核调度实体(Kernel Scheduling Entry)与三者的关系是:
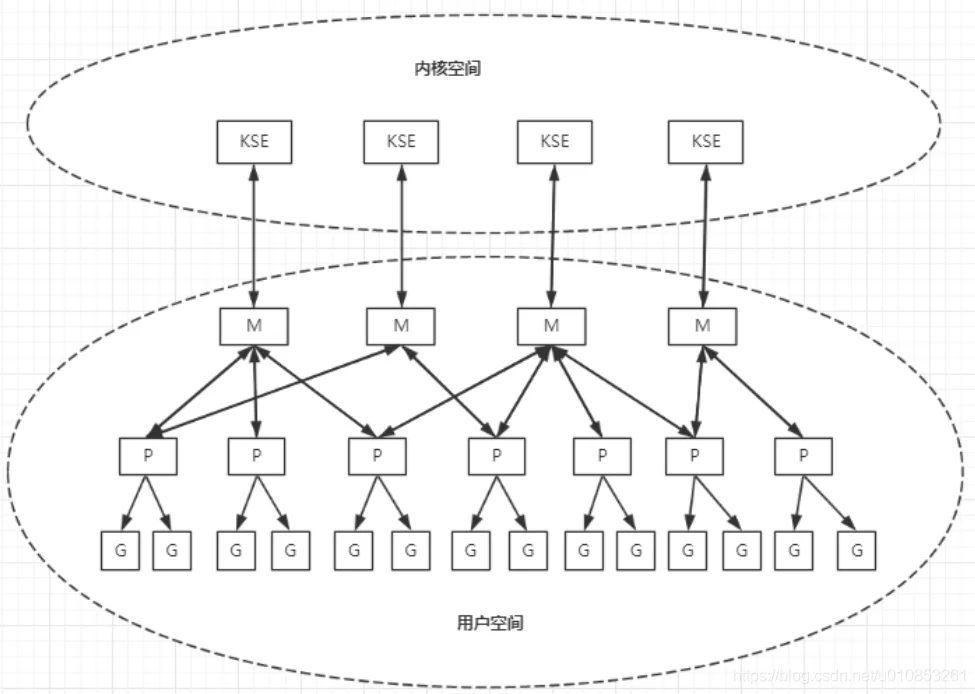
可知:一个G的执行需要M和P的支持。一个M在于一个P关联之后就形成一个有效的G运行环境 【内核线程 + 上下文环境】。每个P都含有一个 可运行G的队列【runq】。队列中的G会被一次传递给本地P关联的M并且获得运行时机。
M 与 KSE 的关系是绝对的一对一,一个M仅能代表一个内核线程。在一个M的生命周期内,仅会和一个内核KSE产生关联。M与P以及P与G之间的关联时多变的,总是会随着调度器的实际调度策略而变化。
这里我们再回顾下G、M、P里面核心成员
G里面的核心成员
- stack :当前g使用的栈空间, 有lo和hi两个成员
- stackguard0 :检查栈空间是否足够的值, 低于这个值会扩张栈, 0是go代码使用的
- stackguard1 :检查栈空间是否足够的值, 低于这个值会扩张栈, 1是原生代码使用的
- m :当前g对应的m
- sched :g的调度数据, 当g中断时会保存当前的pc和rsp等值到这里, 恢复运行时会使用这里的值
- atomicstatus: g的当前状态
- schedlink: 下一个g, 当g在链表结构中会使用
- preempt: g是否被抢占中
- lockedm: g是否要求要回到这个M执行, 有的时候g中断了恢复会要求使用原来的M执行
M里面的核心成员
- g0: 用于调度的特殊g, 调度和执行系统调用时会切换到这个g
- curg: 当前运行的g
- p: 当前拥有的P
- nextp: 唤醒M时, M会拥有这个P
- park: M休眠时使用的信号量, 唤醒M时会通过它唤醒
- schedlink: 下一个m, 当m在链表结构中会使用
- mcache: 分配内存时使用的本地分配器, 和p.mcache一样(拥有P时会复制过来)
- lockedg: lockedm的对应值
P里面的核心成员
- status: p的当前状态
- link: 下一个p, 当p在链表结构中会使用
- m: 拥有这个P的M
- mcache: 分配内存时使用的本地分配器
- runqhead: 本地运行队列的出队序号
- runqtail: 本地运行队列的入队序号
- runq: 本地运行队列的数组, 可以保存256个G
- gfree: G的自由列表, 保存变为_Gdead后可以复用的G实例
- gcBgMarkWorker: 后台GC的worker函数, 如果它存在M会优先执行它
- gcw: GC的本地工作队列, 详细将在下一篇(GC篇)分析
调度器除了设计上面的三个结构体,还有一个全局调度器数据结构schedt:
type schedt struct {
// accessed atomically. keep at top to ensure alignment on 32-bit systems.
// // 下面两个变量需以原子访问访问。保持在 struct 顶部,确保其在 32 位系统上可以对齐
goidgen uint64
lastpoll uint64
lock mutex
// When increasing nmidle, nmidlelocked, nmsys, or nmfreed, be
// sure to call checkdead().
//=====与m数量相关的变量================================================
// 空闲m列表指针
midle muintptr // idle m's waiting for work
// 空闲m的数量
nmidle int32 // number of idle m's waiting for work
// 被锁住的m空闲数量
nmidlelocked int32 // number of locked m's waiting for work
// 已经创建的m的数目和下一个m ID
mnext int64 // number of m's that have been created and next M ID
// 允许创建的m的最大数量
maxmcount int32 // maximum number of m's allowed (or die)
// 不计入死锁的m的数量
nmsys int32 // number of system m's not counted for deadlock
// 释放m的累计数量
nmfreed int64 // cumulative number of freed m's
//系统的goroutine的数量
ngsys uint32 // number of system goroutines; updated atomically
//=====与p数量相关的变量================================================
// 空闲的p列表
pidle puintptr // idle p's
// 空闲p的数量
npidle uint32
//
nmspinning uint32 // See "Worker thread parking/unparking" comment in proc.go.
// Global runnable queue.
// 全局runable g链表的head地址
runqhead guintptr
// 全局runable g链表的tail地址
runqtail guintptr
// 全局runable g链表的大小
runqsize int32
// Global cache of dead G's.
gflock mutex
gfreeStack *g
gfreeNoStack *g
ngfree int32
// Central cache of sudog structs.
sudoglock mutex
sudogcache *sudog
// Central pool of available defer structs of different sizes.
deferlock mutex
deferpool [5]*_defer
// freem is the list of m's waiting to be freed when their
// m.exited is set. Linked through m.freelink.
freem *m
gcwaiting uint32 // gc is waiting to run
stopwait int32
stopnote note
sysmonwait uint32
sysmonnote note
// safepointFn should be called on each P at the next GC
// safepoint if p.runSafePointFn is set.
safePointFn func(*p)
safePointWait int32
safePointNote note
profilehz int32 // cpu profiling rate
procresizetime int64 // nanotime() of last change to gomaxprocs
totaltime int64 // ∫gomaxprocs dt up to procresizetime
}
全局调度器,全局只有一个schedt类型的实例。
sudoG 结构体:
// sudog 代表在等待列表里的 g,比如向 channel 发送/接收内容时
// 之所以需要 sudog 是因为 g 和同步对象之间的关系是多对多的
// 一个 g 可能会在多个等待队列中,所以一个 g 可能被打包为多个 sudog
// 多个 g 也可以等待在同一个同步对象上
// 因此对于一个同步对象就会有很多 sudog 了
// sudog 是从一个特殊的池中进行分配的。用 acquireSudog 和 releaseSudog 来分配和释放 sudog
type sudog struct {
// The following fields are protected by the hchan.lock of the
// channel this sudog is blocking on. shrinkstack depends on
// this for sudogs involved in channel ops.
g *g
selectdone *uint32 // CAS to 1 to win select race (may point to stack)
next *sudog
prev *sudog
elem unsafe.Pointer // data element (may point to stack)
// The following fields are never accessed concurrently.
// For channels, waitlink is only accessed by g.
// For semaphores, all fields (including the ones above)
// are only accessed when holding a semaRoot lock.
acquiretime int64
releasetime int64
ticket uint32
parent *sudog // semaRoot binary tree
waitlink *sudog // g.waiting list or semaRoot
waittail *sudog // semaRoot
c *hchan // channel
}
下面主要分析调度器调度流程的源码,主要分为几个部分:
1)预备知识点
2)main程序启动初始化过程(单独一篇文章写这个)
3)新建 goroutine的过程
4)循环调度的过程
5)抢占式调度的实现
6)初始化P过程
7)初始化M过程
8)初始化G过程
3.1 预备知识
在学习源码之前,需要了解一些关于Golang的一些规范和预备知识。
3.1.1 golang的函数调用规范
在golang里面调用函数,必须要关注的就是参数的传入和返回值。Golang有自己的一套函数调用规范,这个规范定义,所有参数都通过栈传递,返回值也是通过栈传递。
比如,对于函数:
type MyStruct struct {
X int
P *int
}
func someFunc(x int, s MyStruct) (int, MyStruct) { ... }
调用函数时候,栈的内容如下:
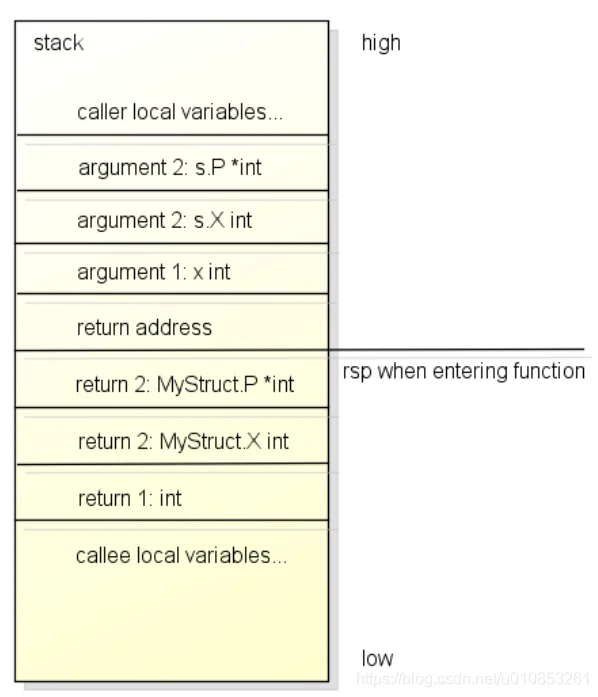
可以看到,参数和返回值都是从低位到高位排列,go函数可以有多个返回值的原因也在此,因为返回值都通过栈传递了。
需要注意这里的"返回地址"是x86和x64上的, arm的返回地址会通过LR寄存器保存, 内容会和这里的稍微不一样.
另外注意的是go和c不一样, 传递 struct 时整个struct 的内容都会复制到栈上, 如果构造体很大将会影响性能。
3.1.2 TLS(thread local storage)
TLS全称是Thread Local Storage,代表每个线程中的本地数据。写入TLS中的数据不会干扰到其余线程中的值。
Go的协程实现非常依赖于TLS机制,会用于获取系统线程中当前的G和G所属于的M实例。
Go操作TLS会使用系统原生的接口,以Linux X64为例,
go在新建M时候会调用arch_prctl 这个syscall来设置FS寄存器的值为M.tls的地址,
运行中每个M的FS寄存器都会指向它们对应的M实例的tls,linux内核调度线程时FS寄存器会跟着线程一起切换,
这样go代码只需要访问FS寄存机就可以获取到线程本地的数据。
3.1.3 栈扩张
go的协程设计是stackful coroutine,每一个goroutine都需要有自己的栈空间,
栈空间的内容再goroutine休眠时候需要保留的,等到重新调度时候恢复(这个时候整个调用树是完整的)。
这样就会引出一个问题,如果系统存在大量的goroutine,给每一个goroutine都预先分配一个足够的栈空间那么go就会使用过多的内存。
为了避免内存使用过多问题,go在一开始时候,会默认只为goroutine分配一个很小的栈空间,它的大小在1.92版本中是2k。
当函数发现栈空间不足时,会申请一块新的栈空间并把原来的栈复制过去。
g实例里面的g.stack、g.stackguard0两个变量来描述goroutine实例的栈。
3.1.4 写屏障(write barrier)
go支持并行GC的,GC的扫描阶段和go代码可以同时运行。这样带来的问题是,GC扫描的过程中go代码的执行可能改变了对象依赖树。
比如:开始扫描时候发现根对象A和B,B拥有C的指针,GC先扫描A,然后B把C的指针交给A,GC再扫描B,这时C就不会被扫描到。
为了避免这个问题,go在GC扫描标记阶段会启用写屏障(Write Barrier)
启用了Write barrier之后,当B把C指针交给A时,GC会认为在这一轮扫描中C的指针是存活的,即使A 可能在稍后丢掉C,那么C在下一轮GC中再回收。
Write barrier只针对指针启用,而且只在GC的标记阶段启用,平时会直接把值写入到目标地址。
3.1.5 m0和g0
go中有特殊的M和G,它们分别是m0和g0。
m0是启动程序后的主线程,这个M对应的实例会在全局变量runtime.m0中,不需要在heap上分配,
m0负责执行初始化操作和启动第一个g, 在之后m0就和其他的m一样了。
g0是仅用于负责调度的G,g0不指向任何可执行的函数, 每个m都会有一个自己的g0。
在调度或系统调用时会使用g0的栈空间, 全局变量的g0是m0的g0。
3.1.6 go中线程的种类
在 runtime 中有三种线程:
- 一种是主线程,
- 一种是用来跑 sysmon 的线程,
- 一种是普通的用户线程。
主线程在 runtime 由对应的全局变量: runtime.m0 来表示。用户线程就是普通的线程了,和 p 绑定,执行 g 中的任务。虽然说是有三种,实际上前两种线程整个 runtime 就只有一个实例。用户线程才会有很多实例。
主线程中用来跑 runtime.main,流程线性执行,没有跳转。
3.2 main线程启动执行
main线程的启动是伴随着go的main goroutine一起启动的,具体的启动流程可看另外一篇博文:
Golang-bootstrap分析 里面关于scheduler.main函数的分析。
3.3 新建goroutine过程
前面已经讲过了,当我们用 go func() 创建一个写的goroutine时候,compiler会编译成对runtime.newproc()的调用。堆栈的结构如下:
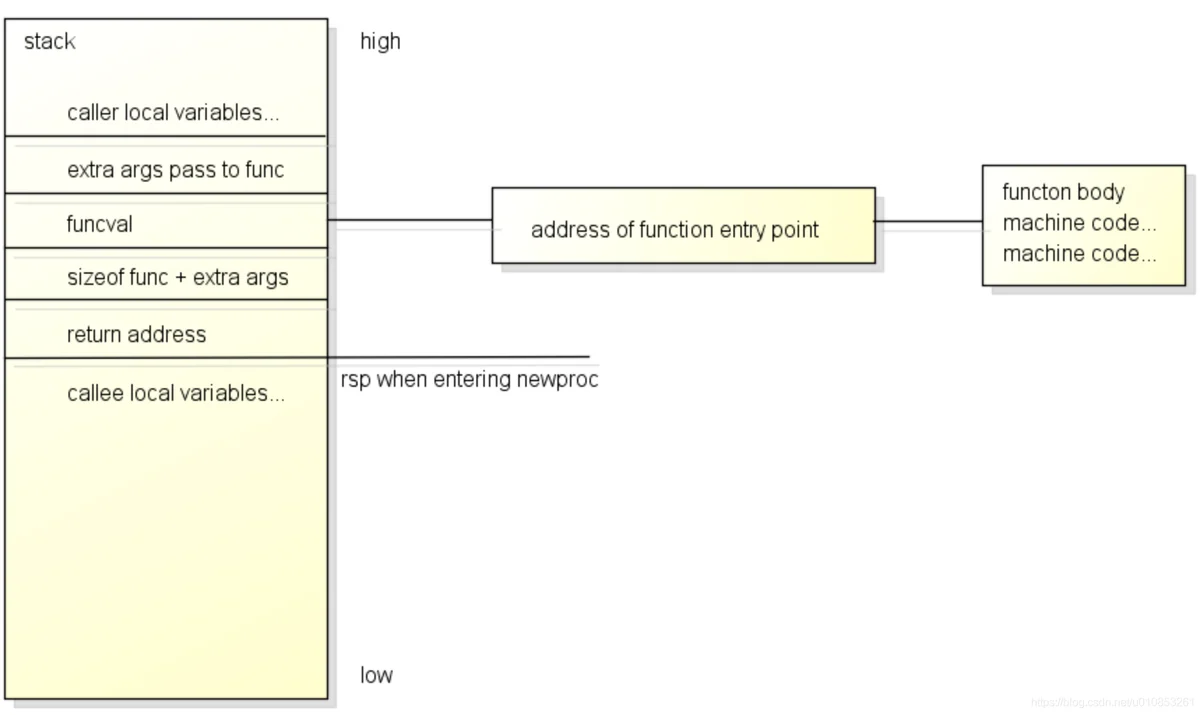
runtime.newproc()源码如下:
// Create a new g running fn with siz bytes of arguments.
// Put it on the queue of g's waiting to run.
// The compiler turns a go statement into a call to this.
// Cannot split the stack because it assumes that the arguments
// are available sequentially after &fn; they would not be
// copied if a stack split occurred.
//go:nosplit
// 根据 参数 fn 和 siz 创建一个 g
// 并把它放置入 自由g队列中等待唤醒
func newproc(siz int32, fn *funcval) {
//获取栈上的参数的指针地址
argp := add(unsafe.Pointer(&fn), sys.PtrSize)
gp := getg()
// 获取pc指针地址
pc := getcallerpc()
// 用g0的栈创建G对象
systemstack(func() {
newproc1(fn, (*uint8)(argp), siz, gp, pc)
})
}
newproc只做了三件事:
- 计算参数的地址 argp
- 获取调用端的地址(返回地址) pc
- 使用systemstack调用 newproc1 函数,也就是用g0的栈创建g对象
systemstack 会切换当前的 g 到 g0, 并且使用g0的栈空间, 然后调用传入的函数, 再切换回原来的g和原来的栈空间。
切换到g0后会假装返回地址是mstart, 这样traceback的时候可以在mstart停止。
这里传给systemstack的是一个闭包, 调用时会把闭包的地址放到寄存器rdx, 具体可以参考上面对闭包的分析。
下面主要看 newproc1 函数主要做的事情:
// Create a new g running fn with narg bytes of arguments starting
// at argp. callerpc is the address of the go statement that created
// this. The new g is put on the queue of g's waiting to run.
// 根据函数参数和函数地址,创建一个新的G,然后将这个G加入队列等待运行
func newproc1(fn *funcval, argp *uint8, narg int32, callergp *g, callerpc uintptr) {
// get g0
_g_ := getg()
// 设置g0对应的m的locks++, 禁止抢占
_g_.m.locks++ // disable preemption because it can be holding p in a local var
// get the p that m has
_p_ := _g_.m.p.ptr()
// new a g
newg := gfget(_p_)
if newg == nil {
newg = malg(_StackMin)
casgstatus(newg, _Gidle, _Gdead)
allgadd(newg) // publishes with a g->status of Gdead so GC scanner doesn't look at uninitialized stack.
}
totalSize := 4*sys.RegSize + uintptr(siz) + sys.MinFrameSize // extra space in case of reads slightly beyond frame
totalSize += -totalSize & (sys.SpAlign - 1) // align to spAlign
sp := newg.stack.hi - totalSize
spArg := sp
// 初始化 g,g 的 gobuf 现场,g 的 m 的 curg
// 以及各种寄存器
memclrNoHeapPointers(unsafe.Pointer(&newg.sched), unsafe.Sizeof(newg.sched))
newg.sched.sp = sp
newg.stktopsp = sp
newg.sched.pc = funcPC(goexit) + sys.PCQuantum // +PCQuantum so that previous instruction is in same function
newg.sched.g = guintptr(unsafe.Pointer(newg))
gostartcallfn(&newg.sched, fn)
newg.gopc = callerpc
newg.ancestors = saveAncestors(callergp)
newg.startpc = fn.fn
if _g_.m.curg != nil {
newg.labels = _g_.m.curg.labels
}
if isSystemGoroutine(newg) {
atomic.Xadd(&sched.ngsys, +1)
}
newg.gcscanvalid = false
casgstatus(newg, _Gdead, _Grunnable)
newg.goid = int64(_p_.goidcache)
_p_.goidcache++
//
runqput(_p_, newg, true)
if atomic.Load(&sched.npidle) != 0 && atomic.Load(&sched.nmspinning) == 0 && mainStarted {
wakep()
}
_g_.m.locks--
if _g_.m.locks == 0 && _g_.preempt { // restore the preemption request in case we've cleared it in newstack
_g_.stackguard0 = stackPreempt
}
}
处理流程如下:
- 调用getg(汇编实现)获取当前的g, 会编译为读取FS寄存器(TLS), 这里会获取到g0
- 设置g对应的m的locks++, 禁止抢占
- 获取m拥有的p
- 新建一个g策略:
- 调用 gfget函数,这里是复用优先策略
- 首先从p的gfree获取回收的g,如果p.gfree链表为空,就从全局调度器sched里面的gfree链表里面steal 32个free的g给p.gfree。
- 将p.gfree链表的head元素获取返回。
- 如果获取不到freeg时调用malg()函数新建一个g, 初始的栈空间大小是2K。
- 调用 gfget函数,这里是复用优先策略
- 把参数复制到g的栈上
- 把返回地址复制到g的栈上, 这里的返回地址是goexit, 表示调用完目标函数后会调用goexit
- 设置g的调度数据(sched)
- 设置sched.sp等于参数+返回地址后的rsp地址
- 设置sched.pc等于目标函数的地址, 查看gostartcallfn和gostartcall
- 设置sched.g等于g
- 设置g的状态为待运行(_Grunnable)
- 调用runqput函数把g放到运行队列
- 首先随机把g放到p.runnext, 如果放到runnext则入队原来在runnext的g;
- 然后尝试把g放到P的local queue;
- 如果local queue(256 capacity)满了则调用runqputslow函数把g放到"全局运行队列"(操作全局 sched 时,需要获取全局 sched.lock 锁,全局锁争抢的开销较大,所以才称之为 slow
- runqputslow会把本地运行队列中一半的g放到全局运行队列, 这样下次就可以快速使用local queue.
- 如果当前有空闲的P,但是没有自旋的M(nmspinning等于0),并且主函数已执行,则唤醒或新建一个M来调度一个P执行
- 这一步非常重要, 用于保证当前有足够的M运行G, 具体请查看上面的"空闲M链表"
- 唤醒或新建一个M会通过调用wakep函数
- 首先交换nmspinning到1, 成功再继续, 多个线程同时执行wakep函数只有一个会继续
- 调用startm函数
- 调用pidleget从"空闲P链表"获取一个空闲的P
- 调用mget从"空闲M链表"获取一个空闲的M
- 如果没有空闲的M, 则调用newm新建一个M
- newm会新建一个m的实例, m的实例包含一个g0, 然后调用newosprocclone一个系统线程
- newosproc会调用syscall clone创建一个新的线程
- 线程创建后会设置TLS, 设置TLS中当前的g为g0, 然后执行mstart
- 调用notewakeup(&mp.park)唤醒线程
创建goroutine的流程就这么多了, 接下来看看M是如何调度的.
3.4 循环调度schedule过程
从前面描述的调度器的工作流可知,scheduler是一个循环的过程。
M启动时会调用mstart函数,m0在初始化后调用,其他的m在线程启动后调用。proc.go源码里面这个函数的注释就是:
//Called to start an M. begin scheduling
mstart函数的处理如下:
- 首先调用getg函数获取当前的g, 这里会获取到g0
- 如果g0未分配栈则从当前的栈空间(系统栈空间)上分配, 也就是说g0会使用系统栈空间
- 调用mstart1函数
- 调用gosave函数保存当前的状态到g0的调度数据中, 以后每次调度都会从这个栈地址开始;
- 调用asminit函数, 不做任何事情;
- 调用minit函数, 设置当前线程可以接收的信号(signal);
- 调用schedule函数。
调用schedule函数后就进入了调度循环,整个流程可以简单总结为:
schedule函数获取g => [必要时休眠] => [唤醒后继续获取] => execute函数执行g => 执行后返回到goexit => 重新执行schedule函数schedule函数处理流程如下:
- 获取当前调度的g,也就是g0,g0在执行调度逻辑;
- 如果当前GC需要停止整个世界(STW), 则调用gcstopm休眠当前的M;
- 如果M拥有的P中指定了需要在安全点运行的函数(P.runSafePointFn), 则运行它;
- 快速获取待运行的G, 以下处理如果有一个获取成功后面就不会继续获取:
- 如果当前GC正在标记阶段, 则查找有没有待运行的GC Worker, GC Worker也是一个G;
- 为了公平起见, 每61次调度从全局运行队列获取一次G, (一直从本地获取可能导致全局运行队列中的G不被运行);
- 从P的本地运行队列中获取G, 调用runqget函数。
- 快速获取失败时, 调用findrunnable函数获取待运行的G, 会阻塞到获取成功为止:
- 如果当前GC需要停止整个世界(STW), 则调用stopm休眠当前的M;
- 如果M拥有的P中指定了需要在安全点运行的函数(P.runSafePointFn), 则运行它;
- 如果有析构器待运行则使用"运行析构器的G";
- 从P的本地运行队列中获取G, 调用runqget函数,如果获取到就返回;
- 从全局运行队列获取G, 调用globrunqget函数, 需要上锁,获取到就返回。;
- 从网络事件反应器获取G, 函数netpoll会获取哪些fd可读可写或已关闭, 然后返回等待fd相关事件的G;
- 如果从local 和 global 都获取不到G, 则执行Work Stealing:
- 调用runqsteal尝试从其他P的本地运行队列盗取一半的G。
- 如果还是获取不到G, 就需要休眠M了, 接下来是休眠的步骤:
- 再次检查当前GC是否在标记阶段, 在则查找有没有待运行的GC Worker, GC Worker也是一个G;
- 再次检查如果当前GC需要停止整个世界, 或者P指定了需要再安全点运行的函数, 则跳到findrunnable的顶部重试;
- 再次检查全局运行队列中是否有G, 有则获取并返回;
- 释放M拥有的P, P会变为空闲(_Pidle)状态;
- 把P添加到"空闲P链表"中;
- 让M离开自旋状态, 这里的处理非常重要, 参考上面的"空闲M链表";
- 首先减少表示当前自旋中的M的数量的全局变量nmspinning;
- 再次检查所有P的本地运行队列, 如果不为空则让M重新进入自旋状态, 并跳findrunnable的顶部重试;
- 再次检查有没有待运行的GC Worker, 有则让M重新进入自旋状态, 并跳到findrunnable的顶部重试
- 再次检查网络事件反应器是否有待运行的G, 这里对netpoll的调用会阻塞, 直到某个fd收到了事件;
- 如果最终还是获取不到G, 调用stopm休眠当前的M;
- 唤醒后跳到findrunnable的顶部重试。
- 成功获取到一个待运行的G;
- 让M离开自旋状态, 调用resetspinning, 这里的处理和上面的不一样:
- 如果当前有空闲的P, 但是无自旋的M(nmspinning等于0), 则唤醒或新建一个M;
- 上面离开自旋状态是为了休眠M, 所以会再次检查所有队列然后休眠;
- 这里离开自选状态是为了执行G, 所以会检查是否有空闲的P, 有则表示可以再开新的M执行G。
- 如果G要求回到指定的M(例如上面的runtime.main):
- 调用startlockedm函数把G和P交给该M, 自己进入休眠;
- 从休眠唤醒后跳到schedule的顶部重试
- 调用execute函数在当前M上执行G。
execute函数执行gp的处理如下:
- 调用getg获取当前的g(g0);
- 把G(gp)的状态由待运行(_Grunnable)改为运行中(_Grunning);
- 设置G的stackguard, 栈空间不足时可以扩张;
- 增加P中记录的调度次数(对应上面的每61次优先获取一次全局运行队列);
- 设置g.m.curg = g;
- 设置gp.m = g0.m;
- 调用gogo函数(在M上执行gp,通过汇编代码实现的,在asm_amd64.s里面有gogo函数在64位平台上实现):
- 这个函数会根据g.sched中保存的状态恢复各个寄存器的值并继续运行g
- 首先针对g.sched.ctxt调用写屏障(GC标记指针存活), ctxt中一般会保存指向[函数+参数]的指针
- 设置TLS中的g为g.sched.g, 也就是g自身
- 设置rsp寄存器为g.sched.rsp
- 设置rax寄存器为g.sched.ret
- 设置rdx寄存器为g.sched.ctxt (上下文)
- 设置rbp寄存器为g.sched.rbp
- 清空sched中保存的信息
- 跳转到g.sched.pc
- 因为前面创建goroutine的newproc1函数把返回地址设为了goexit, 函数运行完毕返回时将会调用goexit函数。
- 自此一次调度过程就结束了。
g.sched.pc在G首次运行时会指向目标函数的第一条机器指令,
如果G被抢占或者等待资源而进入休眠, 在休眠前会保存状态到g.sched,
g.sched.pc会变为唤醒后需要继续执行的地址, "保存状态"的实现将在下面讲解.
目标函数执行完毕后会调用goexit函数,goexit函数会调用goexit1函数,goexit1函数会通过mcall调用goexit0函数。
mcall这个函数就是用于实现"保存状态"的, 处理如下:
- 设置g.sched.pc等于当前的返回地址
- 设置g.sched.sp等于寄存器rsp的值
- 设置g.sched.g等于当前的g
- 设置g.sched.bp等于寄存器rbp的值
- 切换TLS中当前的g等于m.g0
- 设置寄存器rsp等于g0.sched.sp, 使用g0的栈空间
- 设置第一个参数为原来的g
- 设置rdx寄存器为指向函数地址的指针(上下文)
- 调用指定的函数, 不会返回。
mcall这个函数保存当前的运行状态到g.sched, 然后切换到g0和g0的栈空间, 再调用指定的函数。
回到g0的栈空间这个步骤非常重要, 因为这个时候g已经中断, 继续使用g的栈空间且其他M唤醒了这个g将会产生灾难性的后果。
G在中断或者结束后都会通过mcall回到g0的栈空间继续调度, 从goexit调用的mcall的保存状态其实是多余的, 因为G已经结束了。
goexit1函数会通过mcall调用goexit0函数, goexit0函数调用时已经回到了g0的栈空间, 处理如下:
- 把G的状态由运行中(_Grunning)改为已中止(_Gdead)
- 清空G的成员
- 调用dropg函数解除M和G之间的关联
- 调用gfput函数把G放到P的自由列表中, 下次创建G时可以复用
- 调用schedule函数继续调度
G结束后回到schedule函数, 这样就结束了一个调度循环。
不仅只有G结束会重新开始调度, G被抢占或者等待资源也会重新进行调度, 下面继续来看这两种情况。
3.5 抢占式调度实现(sysmon线程)
Golang-bootstrap分析 这篇文章里面我提到了runtime.main会创建一个额外的M运行sysmon函数,抢占式调度就是在sysmon中实现的。
sysmon函数(4249行) 会进入一个无限循环,第一轮回休眠20us,之后每次休眠时间倍增,最终每一轮都会休眠10ms。
sysmon中有netpool(获取fd事件),retake(抢占),forcegc(按时间强制执行gc),scavenge heap(释放自由列表中多余的项减少内存占用)等处理。
retake函数负责处理抢占,流程是:
- 枚举所有的P:
- 如果P在系统调用中(_Psyscall), 且经过了一次sysmon循环(20us~10ms), 则抢占这个P
- 调用handoffp解除M和P之间的关联
- 如果P在运行中(_Prunning), 且经过了一次sysmon循环并且G运行时间超过forcePreemptNS(10ms), 则抢占这个P
- 调用preemptone函数
- 设置g.preempt = true
- 设置g.stackguard0 = stackPreempt
- 如果P在系统调用中(_Psyscall), 且经过了一次sysmon循环(20us~10ms), 则抢占这个P
为什么设置了stackguard就可以实现抢占?
因为这个值用于检查当前栈空间是否足够, go函数的开头会比对这个值判断是否需要扩张栈.
stackPreempt是一个特殊的常量, 它的值会比任何的栈地址都要大, 检查时一定会触发栈扩张.
栈扩张调用的是morestack_noctxt函数, morestack_noctxt函数清空rdx寄存器并调用morestack函数。
morestack函数会保存G的状态到g.sched, 切换到g0和g0的栈空间, 然后调用newstack函数。
newstack函数判断g.stackguard0等于stackPreempt, 就知道这是抢占触发的, 这时会再检查一遍是否要抢占:
- 如果M被锁定(函数的本地变量中有P), 则跳过这一次的抢占并调用gogo函数继续运行G
- 如果M正在分配内存, 则跳过这一次的抢占并调用gogo函数继续运行G
- 如果M设置了当前不能抢占, 则跳过这一次的抢占并调用gogo函数继续运行G
- 如果M的状态不是运行中, 则跳过这一次的抢占并调用gogo函数继续运行G
即使这一次抢占失败, 因为g.preempt等于true, runtime中的一些代码会重新设置stackPreempt以重试下一次的抢占。
如果判断可以抢占, 则继续判断是否GC引起的, 如果是则对G的栈空间执行标记处理(扫描根对象)然后继续运行。
如果不是GC引起的则调用gopreempt_m函数完成抢占。
gopreempt_m函数会调用goschedImpl函数, goschedImpl函数的流程是:
- 把G的状态由运行中(_Grunnable)改为待运行(_Grunnable)
- 调用dropg函数解除M和G之间的关联
- 调用globrunqput把G放到全局运行队列
- 调用schedule函数继续调度
为全局运行队列的优先度比较低, 各个M会经过一段时间再去重新获取这个G执行,
抢占机制保证了不会有一个G长时间的运行导致其他G无法运行的情况发生。
Section4:scheduler与memory allocation、channel、garbage collection关联部分这部分需要完成其余三个主题的学习了之后才能解释~
这篇文章写的真是艰难,参考了很多文章博客,对于scheduler的设计有了基本的了解,学完之后发现其实与channel原理、memory allocation和GC其实关联挺深的,需要详细学习其余部分之后对本文进行再一次修改。